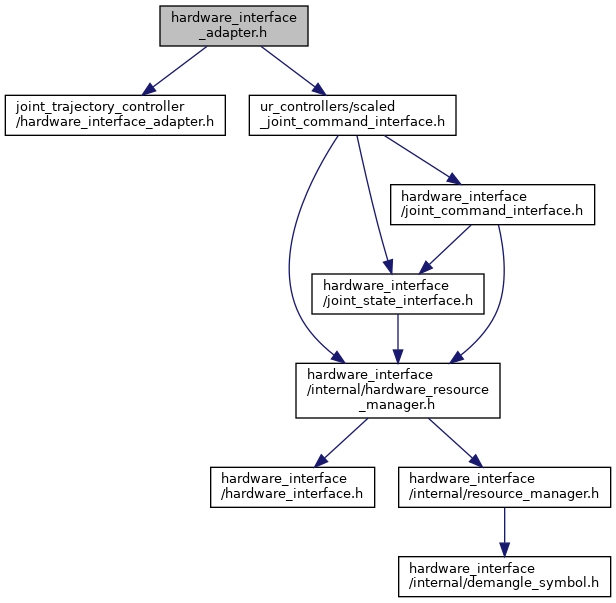
#include <joint_trajectory_controller/hardware_interface_adapter.h>#include "ur_controllers/scaled_joint_command_interface.h"
Include dependency graph for hardware_interface_adapter.h:
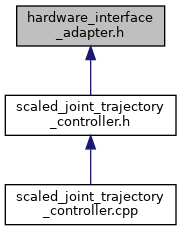
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ur_controllers::ClosedLoopHardwareInterfaceAdapter< State > |
| Helper base class template for closed loop HardwareInterfaceAdapter implementations. More... | |
| class | HardwareInterfaceAdapter< ur_controllers::ScaledPositionJointInterface, State > |
| Adapter for a position-controlled hardware interface. Forwards desired positions as commands. More... | |
| class | HardwareInterfaceAdapter< ur_controllers::ScaledVelocityJointInterface, State > |
| Adapter for an velocity-controlled hardware interface. Maps position and velocity errors to velocity commands through a velocity PID loop. More... | |
Namespaces | |
| ur_controllers | |
Detailed Description
- Date
- 2019-04-18
Definition in file hardware_interface_adapter.h.