This file contains the linux-uart interface functions.
More...
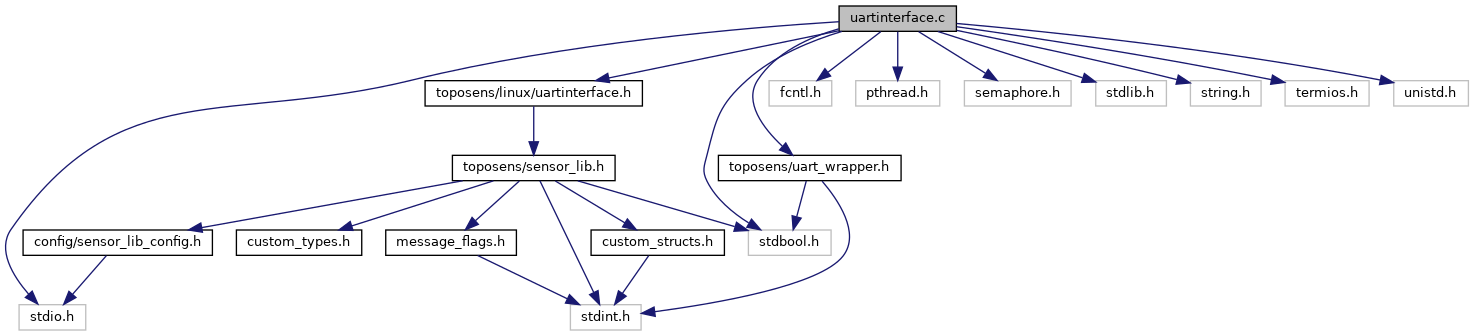
#include "toposens/linux/uartinterface.h"
#include <fcntl.h>
#include <pthread.h>
#include <semaphore.h>
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <termios.h>
#include <unistd.h>
#include "toposens/uart_wrapper.h"
Go to the source code of this file.
|
| int | DeinitUARTPort () |
| | Called from the can-library, this function will close the socket and take care of ReceiverThread termination. More...
|
| |
| static void | PrintPayload (uint8_t *Payload_pu8, uint8_t Length_u8) |
| | Only for debugging - print the content of an UART-Payload to stdout. More...
|
| |
| static void | PrintUARTPayload (uint8_t *Payload_pu8, uint8_t Length_u8) |
| |
| static ssize_t | ReadMsg (uint8_t *Msg_pu8, int InterfaceFS_i) |
| | Should be called periodically to fetch incoming messages from the socket. More...
|
| |
| void * | Receiver (void *arg) |
| | Tries to read CAN frames as long as it is desired. Reacts to abort commands within the set CAN timeout. More...
|
| |
| int | ReceiverThreadShouldRunUART_b () |
| | Reads the while-loop condition in a safe way. More...
|
| |
| void | RegisterUARTReadCallback (void(*Callback)(uint8_t *UARTMsg_pu8, uint16_t UARTMsgSize_u16, uint8_t InterfaceId_u8)) |
| | This function is called by the library to set a callback function for incoming can-traffic. More...
|
| |
| static int | SetupInterface (char *InterfaceName_cp, uint32_t InterfaceBitrate_u32) |
| | Setup of uart-device with given paramters. Currently via system-call. More...
|
| |
| int | SetupUARTPort (char *InterfaceName_cp, uint32_t InterfaceBitrate_u32, uint8_t InterfaceId_u8) |
| | Called from the library, this function will take care of all linux-related uart-setup, socket configuration and starting of the receiver thread. More...
|
| |
| static void | StartReceiverThread (uint8_t InterfaceId_u8, uint32_t InterfaceBitrate_u32, char *InterfaceName_cp) |
| | Creates the Receiver Thread. More...
|
| |
| int | WriteUARTPayload (uint8_t *Payload_pu8, uint8_t Length_u8, uint8_t InterfaceId_u8) |
| | Called to send messages to can socket. More...
|
| |
This file contains the linux-uart interface functions.
- Copyright
- Copyright (c) Toposens GmbH 2021. All rights reserved.
Definition in file uartinterface.c.
◆ UART_LOOP_WAIT_TIME
| #define UART_LOOP_WAIT_TIME 500 |
◆ UART_MAX_PAYLOAD_SIZE
| #define UART_MAX_PAYLOAD_SIZE 10 |
◆ UART_TIMEOUT
Defines how many seconds the ReadUart function will wait for an incoming can-frame.
Definition at line 29 of file uartinterface.c.
◆ UART_TIMEOUT_US
| #define UART_TIMEOUT_US 0 |
Defines how many us the ReadUart function will wait for an incoming can-frame.
Definition at line 33 of file uartinterface.c.
◆ UartInterface_t
◆ DeinitUARTPort()
Called from the can-library, this function will close the socket and take care of ReceiverThread termination.
- Returns
- int 0 if deinit was successful int 1 in case of an error
Definition at line 204 of file uartinterface.c.
◆ PrintPayload()
| static void PrintPayload |
( |
uint8_t * |
Payload_pu8, |
|
|
uint8_t |
Length_u8 |
|
) |
| |
|
static |
Only for debugging - print the content of an UART-Payload to stdout.
- Parameters
-
| [in] | Payload_pu8 | pointer to payload that should be printed |
| [in] | Length_u8 | length of payload |
Definition at line 154 of file uartinterface.c.
◆ PrintUARTPayload()
| static void PrintUARTPayload |
( |
uint8_t * |
Payload_pu8, |
|
|
uint8_t |
Length_u8 |
|
) |
| |
|
static |
◆ ReadMsg()
| static ssize_t ReadMsg |
( |
uint8_t * |
Msg_pu8, |
|
|
int |
InterfaceFS_i |
|
) |
| |
|
static |
Should be called periodically to fetch incoming messages from the socket.
- Parameters
-
| [in] | *Msg_pu8 | |
| [in] | InterfaceFS_i | |
- Returns
- can_frame Read-CAN-Frame. If no message was received after timeout, it will retrun an empty frame.
Definition at line 133 of file uartinterface.c.
◆ Receiver()
| void * Receiver |
( |
void * |
arg | ) |
|
Tries to read CAN frames as long as it is desired. Reacts to abort commands within the set CAN timeout.
- Parameters
-
Definition at line 244 of file uartinterface.c.
◆ ReceiverThreadShouldRunUART_b()
| int ReceiverThreadShouldRunUART_b |
( |
| ) |
|
Reads the while-loop condition in a safe way.
- Returns
- int 0 if receiver should stop int 1 if receiver should be running
Definition at line 233 of file uartinterface.c.
◆ RegisterUARTReadCallback()
| void RegisterUARTReadCallback |
( |
void(*)(uint8_t *UARTMsg_pu8, uint16_t UARTMsgSize_u16, uint8_t InterfaceId_u8) |
Callback | ) |
|
This function is called by the library to set a callback function for incoming can-traffic.
- Parameters
-
| [in] | (*Callback) | Function Pointer to function that shall be called-back if a can-frame was revived |
Definition at line 126 of file uartinterface.c.
◆ SetupInterface()
| static int SetupInterface |
( |
char * |
InterfaceName_cp, |
|
|
uint32_t |
InterfaceBitrate_u32 |
|
) |
| |
|
static |
Setup of uart-device with given paramters. Currently via system-call.
- Parameters
-
| [in] | *InterfaceName_cp | interface-name that shall be configured |
| [in] | InterfaceBitrate_u32 | the interface should be working with |
- Returns
- int 0 if setup was successful int 1 in case of an error
Definition at line 163 of file uartinterface.c.
◆ SetupUARTPort()
| int SetupUARTPort |
( |
char * |
InterfaceName_cp, |
|
|
uint32_t |
InterfaceBitrate_u32, |
|
|
uint8_t |
InterfaceId_u8 |
|
) |
| |
Called from the library, this function will take care of all linux-related uart-setup, socket configuration and starting of the receiver thread.
- Parameters
-
| [in] | *InterfaceName_cp | interface-name that shall be configured |
| [in] | InterfaceBitrate_u32 | Bitrate the interface should be working with |
| [in] | InterfaceId_u8 | |
- Returns
- int 0 if setup was successful int 1 in case of an error
Definition at line 189 of file uartinterface.c.
◆ StartReceiverThread()
| static void StartReceiverThread |
( |
uint8_t |
InterfaceId_u8, |
|
|
uint32_t |
InterfaceBitrate_u32, |
|
|
char * |
InterfaceName_cp |
|
) |
| |
|
static |
Creates the Receiver Thread.
- Parameters
-
| [in] | InterfaceId_u8 | |
| [in] | InterfaceBitrate_u32 | |
| [in] | *InterfaceName_cp | |
Definition at line 213 of file uartinterface.c.
◆ WriteUARTPayload()
| int WriteUARTPayload |
( |
uint8_t * |
Payload_pu8, |
|
|
uint8_t |
Length_u8, |
|
|
uint8_t |
InterfaceId_u8 |
|
) |
| |
Called to send messages to can socket.
- Parameters
-
| [in] | *Payload_pu8 | pointer to payload that should be send |
| [in] | Length_u8 | |
| [in] | InterfaceId_u8 | |
- Returns
- int 0 if the writing was successful int 1 in case of an error
Definition at line 140 of file uartinterface.c.
◆ ConnectedToUART_b
| bool ConnectedToUART_b = false |
|
static |
◆ mutex_uart_receiver
| pthread_mutex_t mutex_uart_receiver = PTHREAD_MUTEX_INITIALIZER |
|
static |
◆ ReadCallback
| void(* ReadCallback) (uint8_t *UARTMsg_pu8, uint16_t DataSize_u16, uint8_t InterfaceId_u8) = NULL |
|
static |
◆ receiver_thread_id
| pthread_t receiver_thread_id |
|
static |
◆ ReceiverThreadShouldRun
| bool ReceiverThreadShouldRun = false |
|
static |
◆ thread_sem
◆ uart_fs
◆ UART_fs