#include <sstream>#include <string>#include <geometry_msgs/TransformStamped.h>#include <ros/ros.h>#include <tf/tf.h>#include <toposens/sensor_lib.h>#include "toposens_msgs/TsScan.h"
Include dependency graph for ros_utils.h:

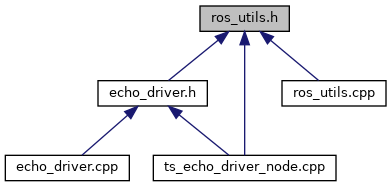
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | toposens_echo_driver::RosParameters |
Namespaces | |
| toposens_echo_driver | |
Functions | |
| auto | toposens_echo_driver::getStaticTransformMsg (const ros::Time &t, const std::vector< float > &trans, const tf::Quaternion &q, const std::string &from, const std::string &to) -> geometry_msgs::TransformStamped |
| Returns geometry_msgs::TransformStamped to be published by TF broadcaster. More... | |
| auto | toposens_echo_driver::to_TsScan (const Sensor_Session_t *session_data, const RosParameters ¶ms) -> toposens_msgs::TsScan |
Converts all points availabble in session_data to ROS message. More... | |