This is the implementation of the SrGenericTactileSensor. It fetches data from the real sensors. More...
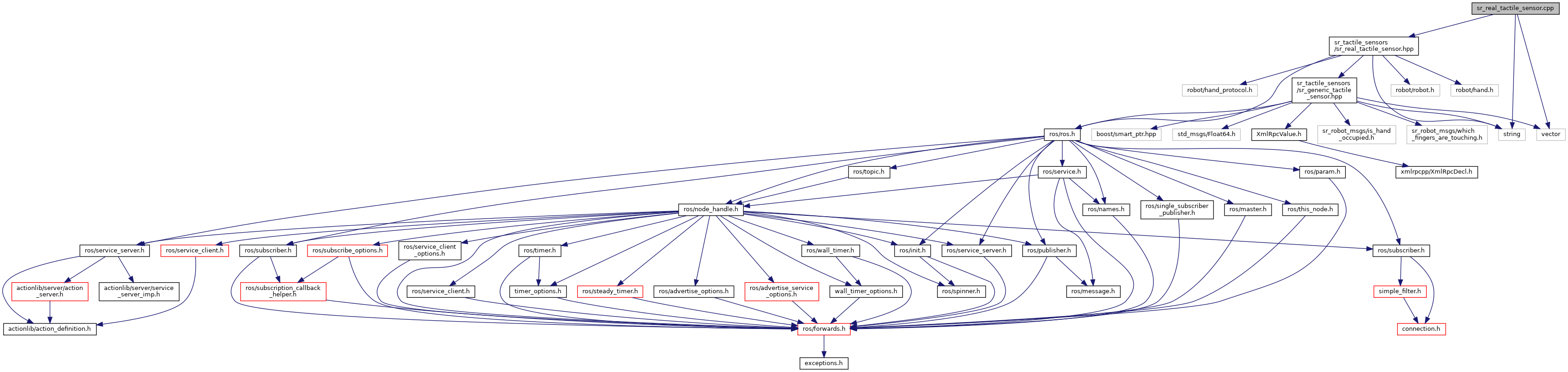
Include dependency graph for sr_real_tactile_sensor.cpp:
Go to the source code of this file.
Namespaces | |
| shadowrobot | |
Functions | |
| int | main (int argc, char **argv) |
Detailed Description
This is the implementation of the SrGenericTactileSensor. It fetches data from the real sensors.
- Date
- Thu Mar 10 11:07:10 2011
Definition in file sr_real_tactile_sensor.cpp.
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
The main function initializes the links with the robot, initializes this ROS publisher regularly publishes data regarding the finger tips tactile sensors
- Parameters
-
argc argv
- Returns
- -1 if error linking with the robot (i.e. robot code not started)
Definition at line 105 of file sr_real_tactile_sensor.cpp.