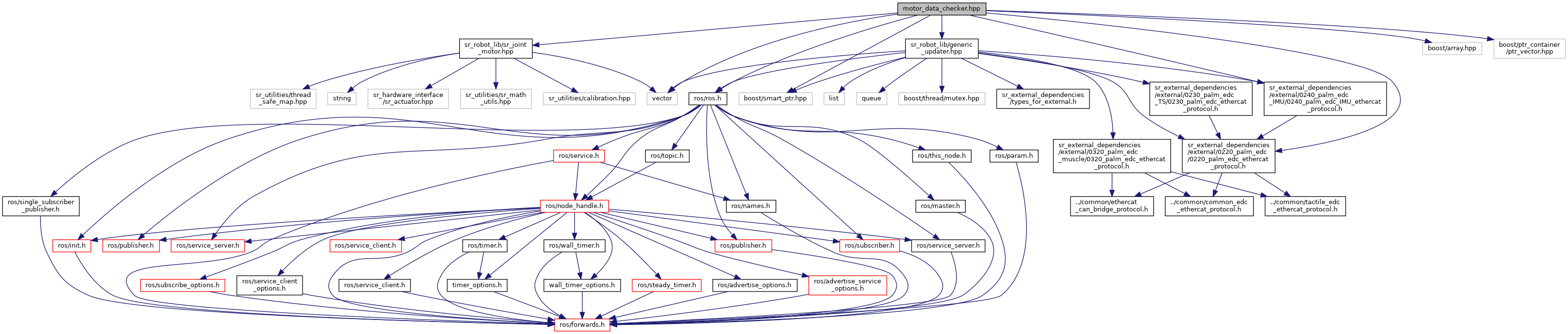
#include <ros/ros.h>#include <vector>#include <boost/array.hpp>#include <boost/smart_ptr.hpp>#include <boost/ptr_container/ptr_vector.hpp>#include "sr_robot_lib/sr_joint_motor.hpp"#include "sr_robot_lib/generic_updater.hpp"#include <sr_external_dependencies/external/0220_palm_edc/0220_palm_edc_ethercat_protocol.h>#include <sr_external_dependencies/external/0240_palm_edc_IMU/0240_palm_edc_IMU_ethercat_protocol.h>
Include dependency graph for motor_data_checker.hpp:
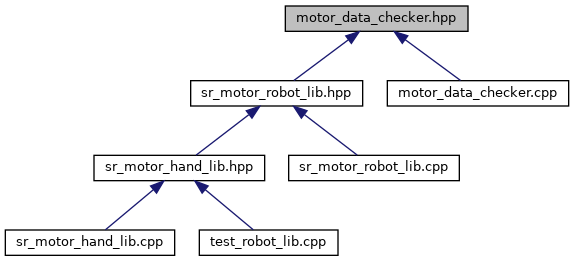
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | generic_updater::MessageChecker |
| class | generic_updater::MessageFromMotorChecker |
| class | generic_updater::MotorDataChecker |
| class | generic_updater::SlowMessageFromMotorChecker |
Namespaces | |
| generic_updater | |