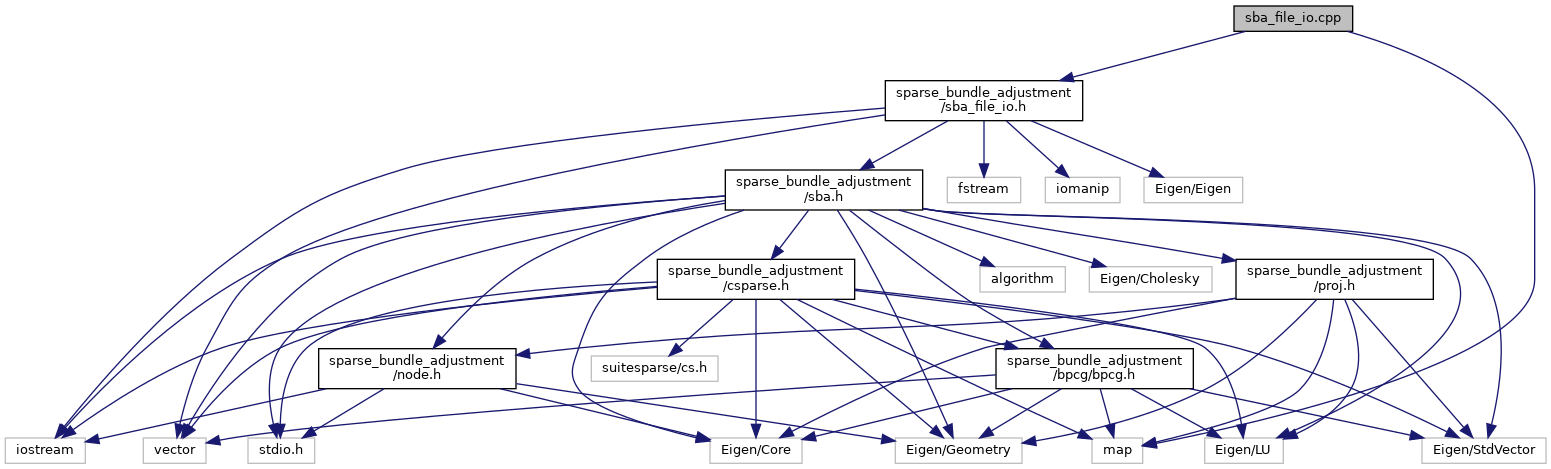
Include dependency graph for sba_file_io.cpp:
Go to the source code of this file.
Functions | |
| void | addnode (SysSPA &spa, int n, std::vector< Eigen::Vector3d, Eigen::aligned_allocator< Eigen::Vector3d > > ntrans, std::vector< Eigen::Vector4d, Eigen::aligned_allocator< Eigen::Vector4d > > nqrot, std::vector< Eigen::Vector2i, Eigen::aligned_allocator< Eigen::Vector2i > > cind, std::vector< Eigen::Vector3d, Eigen::aligned_allocator< Eigen::Vector3d > > ctrans, std::vector< Eigen::Vector4d, Eigen::aligned_allocator< Eigen::Vector4d > > cqrot, std::vector< Eigen::Matrix< double, 6, 6 >, Eigen::aligned_allocator< Eigen::Matrix< double, 6, 6 > > > prec) |
| void | make_covar (double *cv, Matrix< double, 6, 6 > &m) |
| static void | make_qrot (double rr, double rp, double ry, Vector4d &v) |
Function Documentation
◆ addnode()
| void addnode | ( | SysSPA & | spa, |
| int | n, | ||
| std::vector< Eigen::Vector3d, Eigen::aligned_allocator< Eigen::Vector3d > > | ntrans, | ||
| std::vector< Eigen::Vector4d, Eigen::aligned_allocator< Eigen::Vector4d > > | nqrot, | ||
| std::vector< Eigen::Vector2i, Eigen::aligned_allocator< Eigen::Vector2i > > | cind, | ||
| std::vector< Eigen::Vector3d, Eigen::aligned_allocator< Eigen::Vector3d > > | ctrans, | ||
| std::vector< Eigen::Vector4d, Eigen::aligned_allocator< Eigen::Vector4d > > | cqrot, | ||
| std::vector< Eigen::Matrix< double, 6, 6 >, Eigen::aligned_allocator< Eigen::Matrix< double, 6, 6 > > > | prec | ||
| ) |
Definition at line 870 of file sba_file_io.cpp.
◆ make_covar()
| void make_covar | ( | double * | cv, |
| Matrix< double, 6, 6 > & | m | ||
| ) |
Definition at line 957 of file sba_file_io.cpp.
◆ make_qrot()
|
static |
Definition at line 597 of file sba_file_io.cpp.