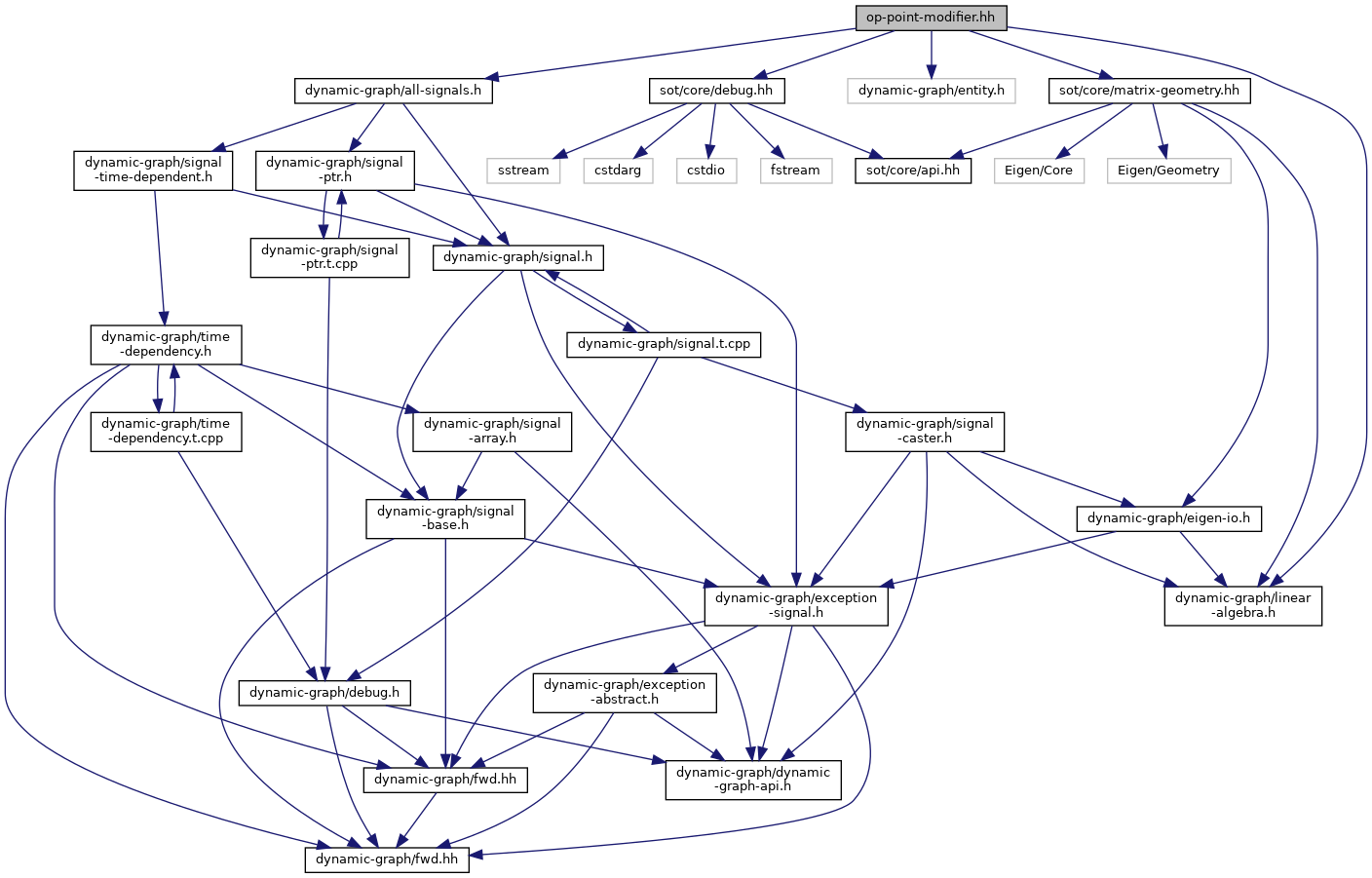
#include <dynamic-graph/all-signals.h>#include <dynamic-graph/entity.h>#include <sot/core/debug.hh>#include <sot/core/matrix-geometry.hh>#include <dynamic-graph/linear-algebra.h>
Include dependency graph for op-point-modifier.hh:
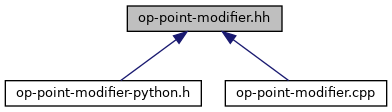
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | dynamicgraph::sot::OpPointModifier |
| Compute position and jacobian of a local frame attached to a joint. More... | |
Namespaces | |
| dynamicgraph | |
| dynamicgraph::sot | |
Macros | |
| #define | SOTOPPOINTMODIFIER_EXPORT |
Macro Definition Documentation
◆ SOTOPPOINTMODIFIER_EXPORT
| #define SOTOPPOINTMODIFIER_EXPORT |
Definition at line 33 of file op-point-modifier.hh.