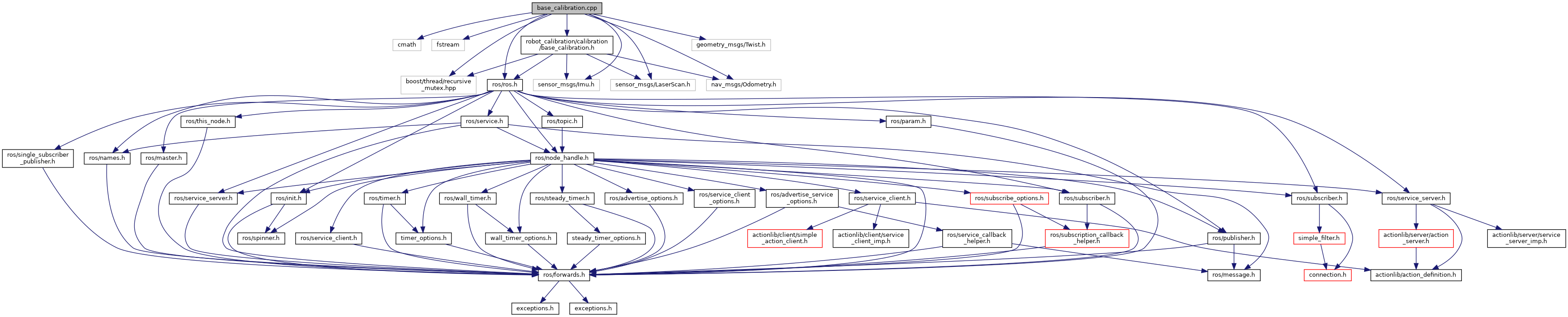
#include <cmath>#include <fstream>#include <boost/thread/recursive_mutex.hpp>#include <ros/ros.h>#include <geometry_msgs/Twist.h>#include <sensor_msgs/Imu.h>#include <sensor_msgs/LaserScan.h>#include <nav_msgs/Odometry.h>#include "robot_calibration/calibration/base_calibration.h"
Include dependency graph for base_calibration.cpp:
Go to the source code of this file.
Namespaces | |
| robot_calibration | |
| Calibration code lives under this namespace. | |
Macros | |
| #define | PI 3.14159265359 |
Macro Definition Documentation
◆ PI
| #define PI 3.14159265359 |
Definition at line 32 of file base_calibration.cpp.