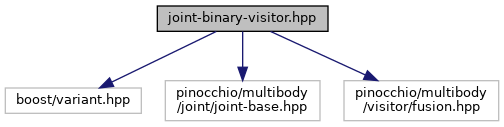
#include <boost/variant.hpp>
#include "pinocchio/multibody/joint/joint-base.hpp"
#include "pinocchio/multibody/visitor/fusion.hpp"
Go to the source code of this file.
|
| struct | pinocchio::fusion::JointBinaryVisitorBase< JointVisitorDerived, ReturnType >::InternalVisitorModel< ArgType, Dummy > |
| |
| struct | pinocchio::fusion::JointBinaryVisitorBase< JointVisitorDerived, ReturnType >::InternalVisitorModel< NoArg, Dummy > |
| |
| struct | pinocchio::fusion::JointBinaryVisitorBase< JointVisitorDerived, ReturnType >::InternalVisitorModelAndData< JointModel1, JointModel2, ArgType > |
| |
| struct | pinocchio::fusion::JointBinaryVisitorBase< JointVisitorDerived, ReturnType >::InternalVisitorModelAndData< JointModel1, JointModel2, NoArg > |
| |
| struct | pinocchio::fusion::JointBinaryVisitorBase< JointVisitorDerived, ReturnType > |
| | Base structure for Binary visitation of two JointModels. This structure provides runners to call the right visitor according to the number of arguments. This should be used when deriving new rigid body algorithms. More...
|
| |