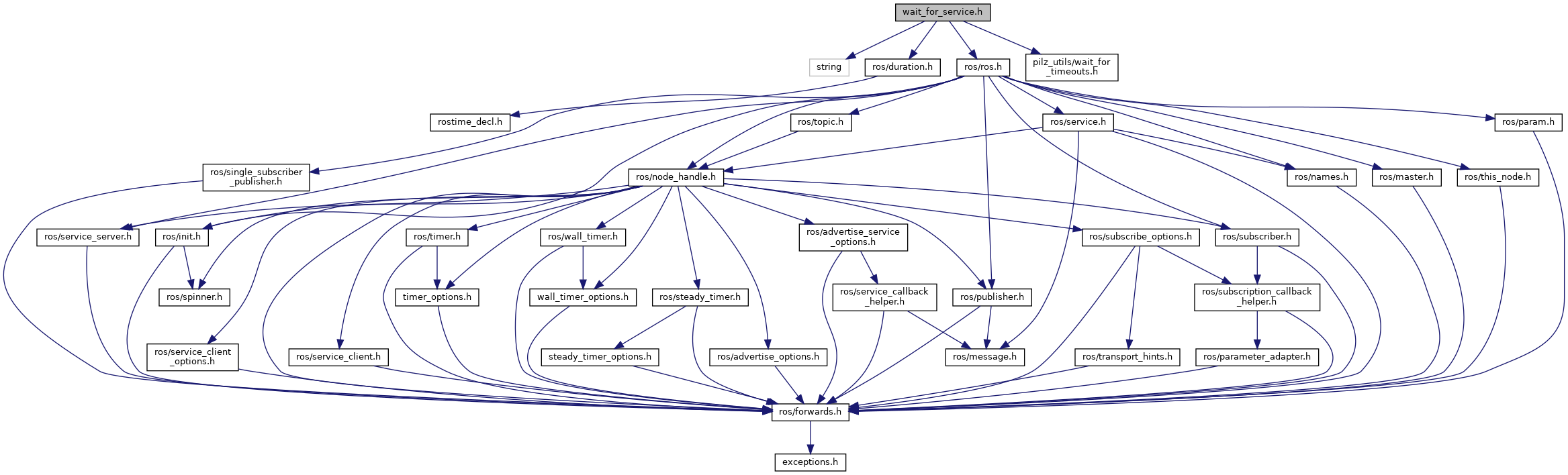
#include <string>#include <ros/duration.h>#include <ros/ros.h>#include <pilz_utils/wait_for_timeouts.h>
Include dependency graph for wait_for_service.h:
Go to the source code of this file.
Namespaces | |
| pilz_utils | |
Functions | |
| static void | pilz_utils::waitForService (const std::string service_name, const double retry_timeout=DEFAULT_RETRY_TIMEOUT, const double msg_output_period=DEFAULT_MSG_OUTPUT_PERIOD) |
| Waits until the specified service starts. More... | |