Sample PD component $Date$. More...
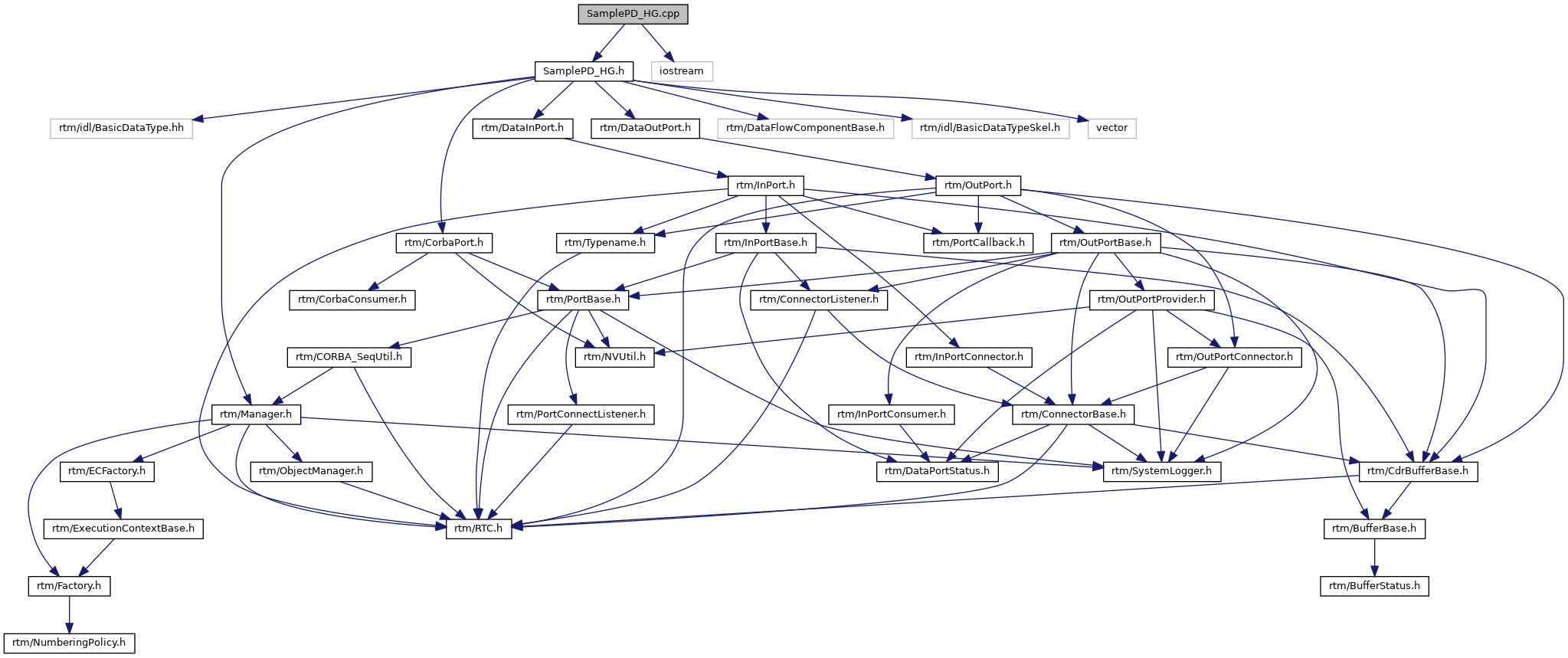
Go to the source code of this file.
Macros | |
| #define | ACC_FILE "etc/acc.dat" |
| #define | ANGLE_FILE "etc/angle.dat" |
| #define | CHEST 28 |
| #define | GAIN_FILE "etc/PDgain.dat" |
| #define | HG_DOF (12) |
| #define | LARM_ELBOW 22 |
| #define | LARM_SHOULDER_P 19 |
| #define | LARM_SHOULDER_R 20 |
| #define | LARM_SHOULDER_Y 21 |
| #define | LARM_WRIST_P 24 |
| #define | LARM_WRIST_R 25 |
| #define | LARM_WRIST_Y 23 |
| #define | LLEG_ANKLE_P 17 |
| #define | LLEG_ANKLE_R 18 |
| #define | LLEG_HIP_P 14 |
| #define | LLEG_HIP_R 13 |
| #define | LLEG_HIP_Y 15 |
| #define | LLEG_KNEE 16 |
| #define | PD_DOF (17) |
| #define | RARM_ELBOW 9 |
| #define | RARM_SHOULDER_P 6 |
| #define | RARM_SHOULDER_R 7 |
| #define | RARM_SHOULDER_Y 8 |
| #define | RARM_WRIST_P 11 |
| #define | RARM_WRIST_R 12 |
| #define | RARM_WRIST_Y 10 |
| #define | RLEG_ANKLE_P 4 |
| #define | RLEG_ANKLE_R 5 |
| #define | RLEG_HIP_P 1 |
| #define | RLEG_HIP_R 0 |
| #define | RLEG_HIP_Y 2 |
| #define | RLEG_KNEE 3 |
| #define | TIMESTEP 0.002 |
| #define | VEL_FILE "etc/vel.dat" |
| #define | WAIST_P 26 |
| #define | WAIST_R 27 |
Functions | |
| DLL_EXPORT void | SamplePD_HGInit (RTC::Manager *manager) |
Variables | |
| static const char * | SamplePD_HG_spec [] |
Detailed Description
Macro Definition Documentation
◆ ACC_FILE
| #define ACC_FILE "etc/acc.dat" |
Definition at line 59 of file SamplePD_HG.cpp.
◆ ANGLE_FILE
| #define ANGLE_FILE "etc/angle.dat" |
Definition at line 57 of file SamplePD_HG.cpp.
◆ CHEST
| #define CHEST 28 |
Definition at line 29 of file SamplePD_HG.cpp.
◆ GAIN_FILE
| #define GAIN_FILE "etc/PDgain.dat" |
Definition at line 61 of file SamplePD_HG.cpp.
◆ HG_DOF
| #define HG_DOF (12) |
Definition at line 24 of file SamplePD_HG.cpp.
◆ LARM_ELBOW
| #define LARM_ELBOW 22 |
Definition at line 33 of file SamplePD_HG.cpp.
◆ LARM_SHOULDER_P
| #define LARM_SHOULDER_P 19 |
Definition at line 30 of file SamplePD_HG.cpp.
◆ LARM_SHOULDER_R
| #define LARM_SHOULDER_R 20 |
Definition at line 31 of file SamplePD_HG.cpp.
◆ LARM_SHOULDER_Y
| #define LARM_SHOULDER_Y 21 |
Definition at line 32 of file SamplePD_HG.cpp.
◆ LARM_WRIST_P
| #define LARM_WRIST_P 24 |
Definition at line 35 of file SamplePD_HG.cpp.
◆ LARM_WRIST_R
| #define LARM_WRIST_R 25 |
Definition at line 36 of file SamplePD_HG.cpp.
◆ LARM_WRIST_Y
| #define LARM_WRIST_Y 23 |
Definition at line 34 of file SamplePD_HG.cpp.
◆ LLEG_ANKLE_P
| #define LLEG_ANKLE_P 17 |
Definition at line 48 of file SamplePD_HG.cpp.
◆ LLEG_ANKLE_R
| #define LLEG_ANKLE_R 18 |
Definition at line 49 of file SamplePD_HG.cpp.
◆ LLEG_HIP_P
| #define LLEG_HIP_P 14 |
Definition at line 45 of file SamplePD_HG.cpp.
◆ LLEG_HIP_R
| #define LLEG_HIP_R 13 |
Definition at line 44 of file SamplePD_HG.cpp.
◆ LLEG_HIP_Y
| #define LLEG_HIP_Y 15 |
Definition at line 46 of file SamplePD_HG.cpp.
◆ LLEG_KNEE
| #define LLEG_KNEE 16 |
Definition at line 47 of file SamplePD_HG.cpp.
◆ PD_DOF
| #define PD_DOF (17) |
Definition at line 23 of file SamplePD_HG.cpp.
◆ RARM_ELBOW
| #define RARM_ELBOW 9 |
Definition at line 40 of file SamplePD_HG.cpp.
◆ RARM_SHOULDER_P
| #define RARM_SHOULDER_P 6 |
Definition at line 37 of file SamplePD_HG.cpp.
◆ RARM_SHOULDER_R
| #define RARM_SHOULDER_R 7 |
Definition at line 38 of file SamplePD_HG.cpp.
◆ RARM_SHOULDER_Y
| #define RARM_SHOULDER_Y 8 |
Definition at line 39 of file SamplePD_HG.cpp.
◆ RARM_WRIST_P
| #define RARM_WRIST_P 11 |
Definition at line 42 of file SamplePD_HG.cpp.
◆ RARM_WRIST_R
| #define RARM_WRIST_R 12 |
Definition at line 43 of file SamplePD_HG.cpp.
◆ RARM_WRIST_Y
| #define RARM_WRIST_Y 10 |
Definition at line 41 of file SamplePD_HG.cpp.
◆ RLEG_ANKLE_P
| #define RLEG_ANKLE_P 4 |
Definition at line 54 of file SamplePD_HG.cpp.
◆ RLEG_ANKLE_R
| #define RLEG_ANKLE_R 5 |
Definition at line 55 of file SamplePD_HG.cpp.
◆ RLEG_HIP_P
| #define RLEG_HIP_P 1 |
Definition at line 51 of file SamplePD_HG.cpp.
◆ RLEG_HIP_R
| #define RLEG_HIP_R 0 |
Definition at line 50 of file SamplePD_HG.cpp.
◆ RLEG_HIP_Y
| #define RLEG_HIP_Y 2 |
Definition at line 52 of file SamplePD_HG.cpp.
◆ RLEG_KNEE
| #define RLEG_KNEE 3 |
Definition at line 53 of file SamplePD_HG.cpp.
◆ TIMESTEP
| #define TIMESTEP 0.002 |
Definition at line 25 of file SamplePD_HG.cpp.
◆ VEL_FILE
| #define VEL_FILE "etc/vel.dat" |
Definition at line 58 of file SamplePD_HG.cpp.
◆ WAIST_P
| #define WAIST_P 26 |
Definition at line 27 of file SamplePD_HG.cpp.
◆ WAIST_R
| #define WAIST_R 27 |
Definition at line 28 of file SamplePD_HG.cpp.
Function Documentation
◆ SamplePD_HGInit()
| DLL_EXPORT void SamplePD_HGInit | ( | RTC::Manager * | manager | ) |
Definition at line 387 of file SamplePD_HG.cpp.
Variable Documentation
◆ SamplePD_HG_spec
|
static |
Definition at line 70 of file SamplePD_HG.cpp.