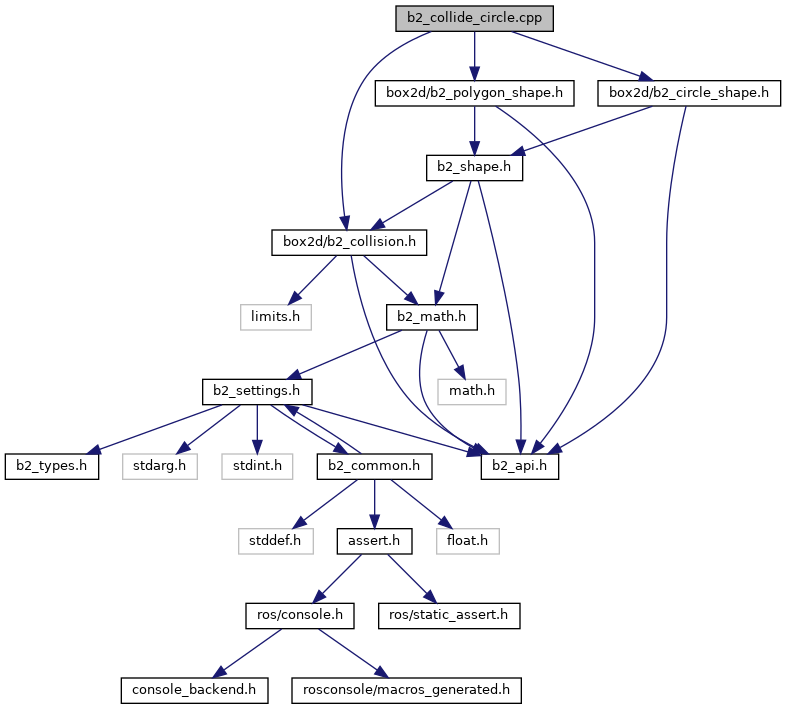
#include "box2d/b2_collision.h"#include "box2d/b2_circle_shape.h"#include "box2d/b2_polygon_shape.h"
Include dependency graph for b2_collide_circle.cpp:
Go to the source code of this file.
Functions | |
| void | b2CollideCircles (b2Manifold *manifold, const b2CircleShape *circleA, const b2Transform &xfA, const b2CircleShape *circleB, const b2Transform &xfB) |
| Compute the collision manifold between two circles. More... | |
| void | b2CollidePolygonAndCircle (b2Manifold *manifold, const b2PolygonShape *polygonA, const b2Transform &xfA, const b2CircleShape *circleB, const b2Transform &xfB) |
| Compute the collision manifold between a polygon and a circle. More... | |
Function Documentation
◆ b2CollideCircles()
| void b2CollideCircles | ( | b2Manifold * | manifold, |
| const b2CircleShape * | circleA, | ||
| const b2Transform & | xfA, | ||
| const b2CircleShape * | circleB, | ||
| const b2Transform & | xfB | ||
| ) |
Compute the collision manifold between two circles.
Definition at line 27 of file b2_collide_circle.cpp.
◆ b2CollidePolygonAndCircle()
| void b2CollidePolygonAndCircle | ( | b2Manifold * | manifold, |
| const b2PolygonShape * | polygonA, | ||
| const b2Transform & | xfA, | ||
| const b2CircleShape * | circleB, | ||
| const b2Transform & | xfB | ||
| ) |
Compute the collision manifold between a polygon and a circle.
Definition at line 55 of file b2_collide_circle.cpp.