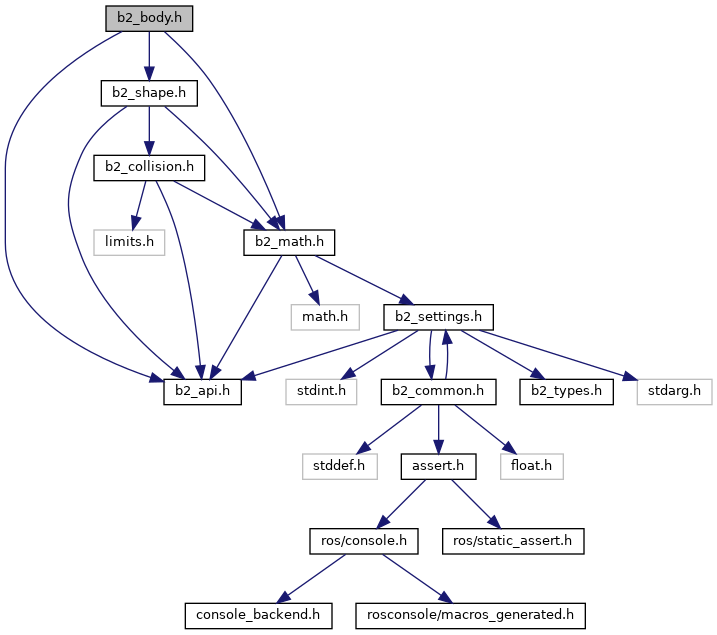
Include dependency graph for b2_body.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | b2Body |
| A rigid body. These are created via b2World::CreateBody. More... | |
| struct | b2BodyDef |
Enumerations | |
| enum | b2BodyType { b2_staticBody = 0, b2_kinematicBody, b2_dynamicBody } |
Enumeration Type Documentation
◆ b2BodyType
| enum b2BodyType |