Matching quality evaluator: comparison via voxel occupancy. More...
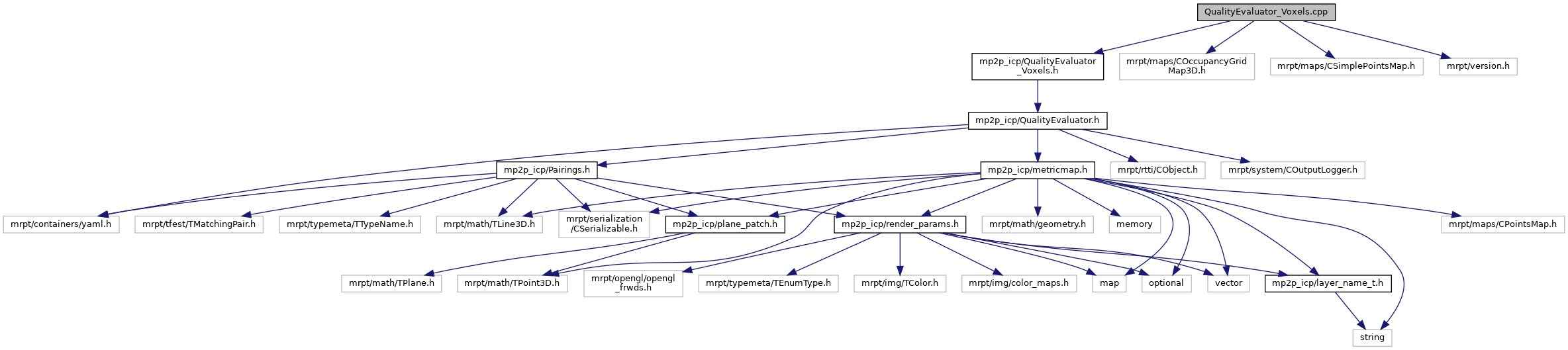
#include <mp2p_icp/QualityEvaluator_Voxels.h>#include <mrpt/maps/COccupancyGridMap3D.h>#include <mrpt/maps/CSimplePointsMap.h>#include <mrpt/version.h>
Include dependency graph for QualityEvaluator_Voxels.cpp:
Go to the source code of this file.
Functions | |
| static double | loss (double x, double y) |
Detailed Description
Matching quality evaluator: comparison via voxel occupancy.
- Date
- July 14, 2020
Definition in file QualityEvaluator_Voxels.cpp.
Function Documentation
◆ loss()
|
static |
Definition at line 36 of file QualityEvaluator_Voxels.cpp.