Pointcloud matcher: point to plane-fit of nearby points. More...
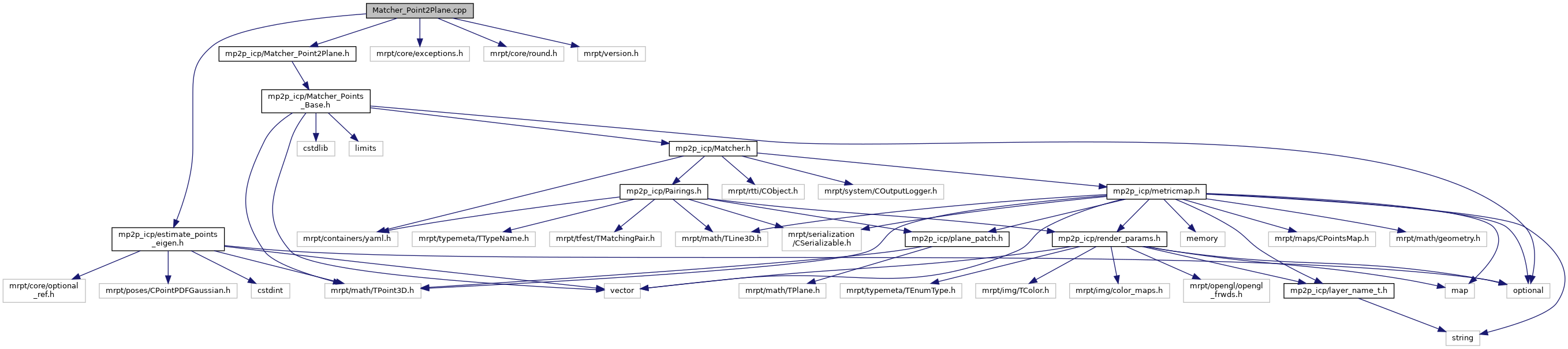
#include <mp2p_icp/Matcher_Point2Plane.h>#include <mp2p_icp/estimate_points_eigen.h>#include <mrpt/core/exceptions.h>#include <mrpt/core/round.h>#include <mrpt/version.h>
Include dependency graph for Matcher_Point2Plane.cpp:
Go to the source code of this file.
Functions | |
| static void | filterListByMaxDist (std::vector< size_t > &kddIdxs, std::vector< float > &kddSqrDist, const float maxDistForCorrespondenceSquared) |
Detailed Description
Pointcloud matcher: point to plane-fit of nearby points.
- Date
- July 21, 2020
Definition in file Matcher_Point2Plane.cpp.
Function Documentation
◆ filterListByMaxDist()
|
static |
Definition at line 44 of file Matcher_Point2Plane.cpp.