#include <chrono>#include <thread>#include <mrpt_msgs/GetCMGraph.h>#include <mrpt_msgs_bridge/network_of_poses.h>#include <mrpt/ros1bridge/pose.h>#include <mrpt/math/CMatrixFixed.h>
Include dependency graph for CGraphSlamEngine_MR_impl.h:

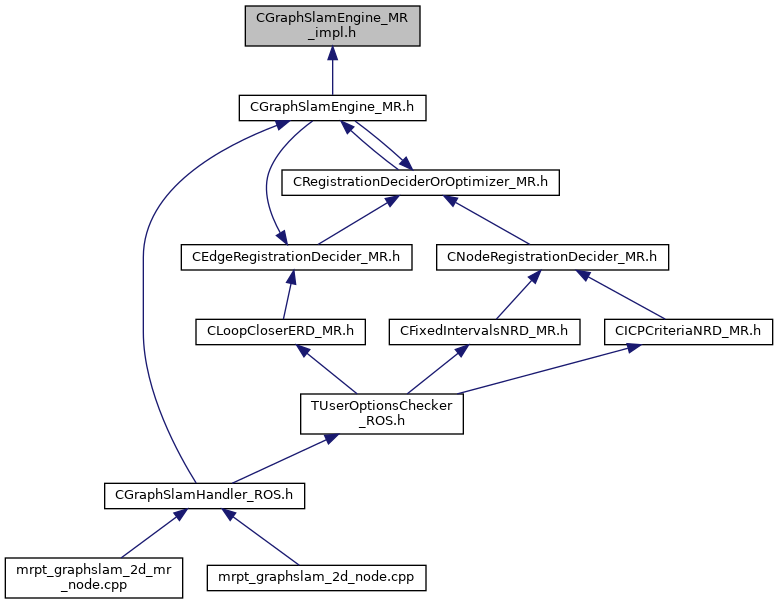
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| mrpt::graphslam | |
| mrpt::math | |
Typedefs | |
| template<typename T , std::size_t ROWS, std::size_t COLS> | |
| using | mrpt::math::CMatrixFixedNumeric = CMatrixFixed< T, ROWS, COLS > |