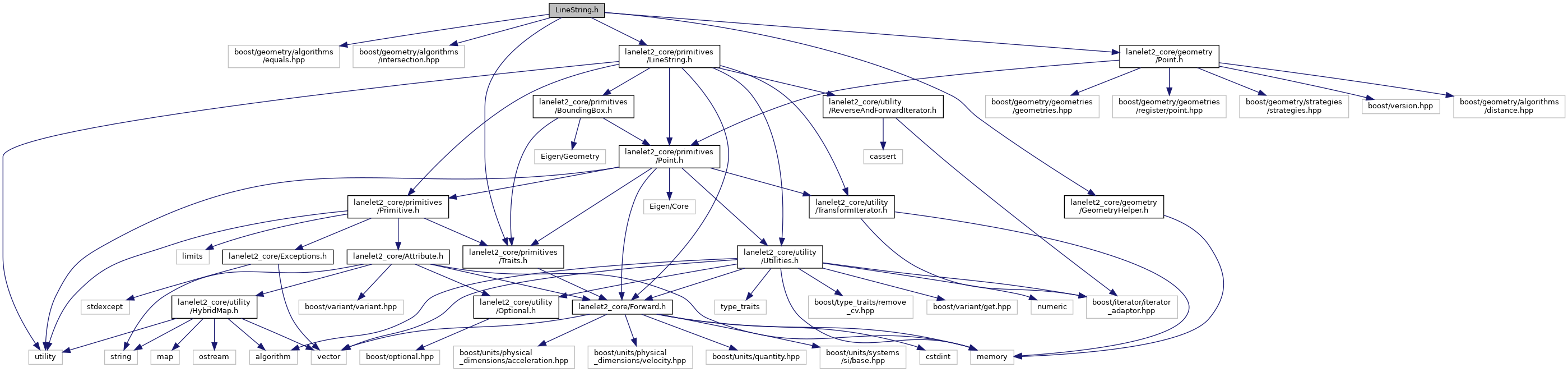
#include <boost/geometry/algorithms/equals.hpp>#include <boost/geometry/algorithms/intersection.hpp>#include "lanelet2_core/geometry/GeometryHelper.h"#include "lanelet2_core/geometry/Point.h"#include "lanelet2_core/primitives/LineString.h"#include "lanelet2_core/primitives/Traits.h"
Include dependency graph for geometry/impl/LineString.h:
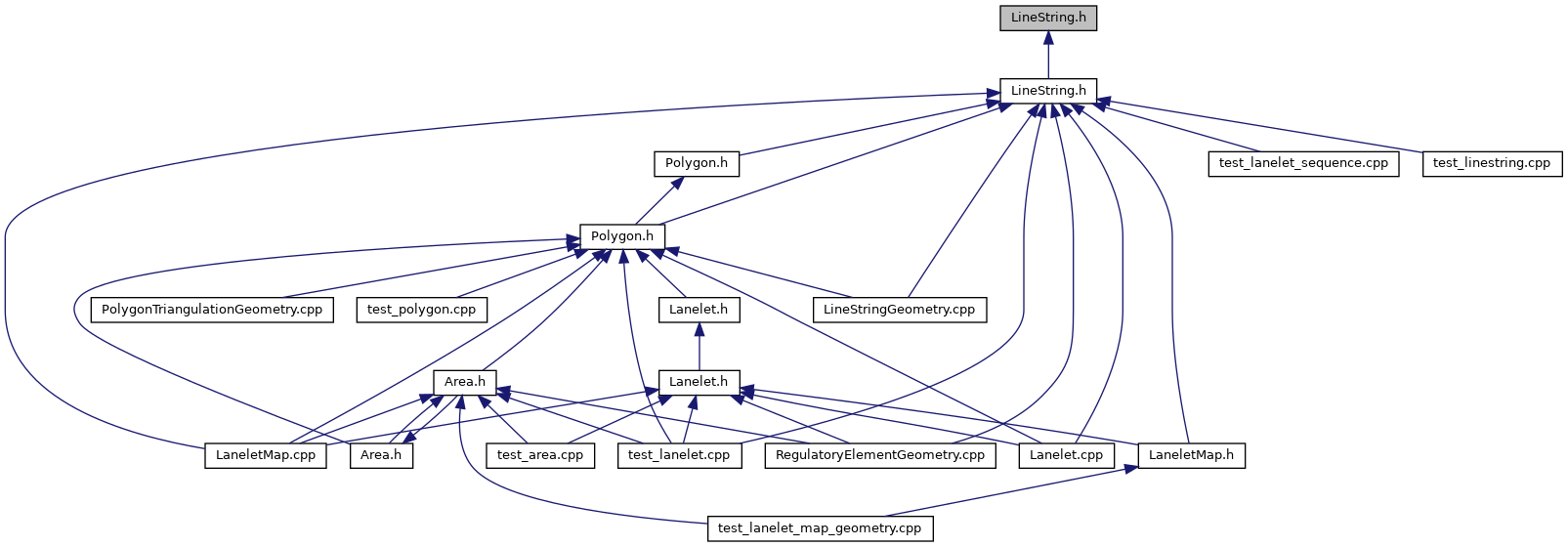
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| lanelet | |
| lanelet::geometry | |
| lanelet::geometry::internal | |
Typedefs | |
| using | lanelet::geometry::internal::IndexedSegment2d = std::pair< BasicSegment2d, size_t > |
| using | lanelet::geometry::internal::IndexedSegmentTree = bgi::rtree< IndexedSegment2d, bgi::linear< 4 > > |
| using | lanelet::geometry::internal::SegmentMap = std::map< size_t, LineStringsCoordinate > |
| using | lanelet::geometry::internal::SegmentTree = bgi::rtree< BasicSegment2d, bgi::linear< 4 > > |
| using | lanelet::geometry::internal::SelfIntersections2d = std::vector< SelfIntersection2d > |
Functions | |
| template<typename LineStringT > | |
| std::vector< double > | lanelet::geometry::accumulatedLengthRatios (const LineStringT &lineString) |
| template<typename LineString1T , typename LineString2T > | |
| std::pair< LineString1T, LineString2T > | lanelet::geometry::align (LineString1T left, LineString2T right) |
| inverts the two linestrings such that they are parallel More... | |
| template<typename LineString2dT > | |
| IfLS< LineString2dT, BoundingBox2d > | lanelet::geometry::boundingBox2d (const LineString2dT &lineString) |
| Get the surrounding axis-aligned bounding box in 2d. More... | |
| template<typename LineString3dT > | |
| IfLS< LineString3dT, BoundingBox3d > | lanelet::geometry::boundingBox3d (const LineString3dT &lineString) |
| Get the surrounding axis-aligned bounding box in 3d. More... | |
| template<typename LineString2dT > | |
| void | lanelet::geometry::internal::checkForInversion (const LineString2dT &oldLS, const BasicLineString2d &offsetLS, const double distance, const double epsilon=1.e-7) |
| checkForInversion asserts that a shifted line string is not inverted relative to the original line string by checking the distance of those More... | |
| auto | lanelet::geometry::internal::crossProd (const BasicPoint3d &p1, const BasicPoint3d &p2) |
| auto | lanelet::geometry::internal::crossProd (const BasicPoint2d &p1, const BasicPoint2d &p2) |
| auto | lanelet::geometry::internal::crossProd (const Eigen::Matrix< double, 2, 1 > &p1, const Eigen::Matrix< double, 2, 1 > &p2) |
| template<typename Point2dT > | |
| double | lanelet::geometry::curvature2d (const Point2dT &p1, const Point2dT &p2, const Point2dT &p3) |
| template<typename LineString3d1T , typename LineString3d2T > | |
| IfLS2< LineString3d1T, LineString3d2T, double > | lanelet::geometry::distance3d (const LineString3d1T &l1, const LineString3d2T &l2) |
| template<typename LineString2dT > | |
| std::vector< BasicLineString2d > | lanelet::geometry::internal::extractConvex (const LineString2dT &lineString, const double distance) |
| extractConvex get convex parts of line string offset by distance. More... | |
| PointSearchResult | lanelet::geometry::internal::findNextPoint (const SelfIntersections2d &curSegIntersections, const BasicSegment2d &seg, const double lastS, const size_t i) |
| findNextPoint find next point to walk on a line strings join operation More... | |
| template<typename LineStringT , typename BasicPointT > | |
| auto | lanelet::geometry::internal::findPoint (const LineStringT &ls, const BasicPointT &p) |
| template<typename LineString2dT > | |
| BasicPoint2d | lanelet::geometry::fromArcCoordinates (const LineString2dT &lineString, const ArcCoordinates &arcCoords) |
| create a point by moving laterally arcCoords.distance from the linestring point at arcCoords.length More... | |
| template<typename HybridLineStringT > | |
| BasicPoint2d | lanelet::geometry::internal::fromArcCoords (const HybridLineStringT &hLineString, const BasicPoint2d &projStart, const size_t startIdx, const size_t endIdx, const double distance) |
| template<typename LineString2dT > | |
| Convexity | lanelet::geometry::internal::getConvexity (const LineString2dT &lineString, const size_t idx, const PointVincinity &pv, const bool offsetPositive) |
| Optional< size_t > | lanelet::geometry::internal::getLowestSAbove (const SelfIntersections2d &selfIntersections, const double minS) |
| getLowestSAbove find self-intersection nearest to the given start point along a segment More... | |
| SelfIntersections2d | lanelet::geometry::internal::getSelfIntersectionsAt (const IndexedSegmentTree &tree, const size_t segToCheck, const BasicSegment2d &seg) |
| getSelfIntersectionsAt find list of intersections based on a segment search tree More... | |
| template<typename LineStringT > | |
| traits::BasicPointT< traits::PointType< LineStringT > > | lanelet::geometry::interpolatedPointAtDistance (LineStringT lineString, double dist) |
| template<typename LineString3dT > | |
| IfLS< LineString3dT, bool > | lanelet::geometry::intersects3d (const LineString3dT &linestring, const LineString3dT &otherLinestring, double heightTolerance=3.) |
| test whether two linestrings intersect in 3d. More... | |
| template<typename LineStringT > | |
| LineStringT | lanelet::geometry::internal::invert (const LineStringT &ls) |
| template<> | |
| BasicLineString2d | lanelet::geometry::internal::invert (const BasicLineString2d &ls) |
| template<> | |
| BasicLineString3d | lanelet::geometry::internal::invert (const BasicLineString3d &ls) |
| template<typename LineString2dT > | |
| bool | lanelet::geometry::internal::isConvex (const LineString2dT &lineString, const size_t idx, const bool offsetPositive) |
| template<typename LineStringT , typename BasicPointT > | |
| bool | lanelet::geometry::internal::isLeftOf (const LineStringT &ls, const BasicPointT &p, const ProjectedPointInfo< BasicPointT > &ppInfo) |
| BasicLineString2d | lanelet::geometry::internal::joinSubStrings (const std::vector< BasicLineString2d > &convexSubStrings, const IndexedSegmentTree &tree, const SegmentMap &segMap) |
| joinSubStrings create one line string of several ones by walking along them and joining them at the first intersection More... | |
| template<typename LineString2dT > | |
| BasicPoint2d | lanelet::geometry::internal::lateralShiftPointAtIndex (const LineString2dT &lineString, const int idx, const double distance) |
| create a point by moving distance laterally from the linestring at the point idx. The direction is the average of the directions orthogonal to the segments neighbouring the point. More... | |
| template<typename LineStringT > | |
| std::vector< double > | lanelet::geometry::lengthRatios (const LineStringT &lineString) |
| IndexedSegmentTree | lanelet::geometry::internal::makeIndexedSegmenTree (const BasicLineString2d &lineString) |
| makeIndexedSegmenTree create search tree of segments with indices More... | |
| template<typename LineString2dT > | |
| SegmentTree | lanelet::geometry::internal::makeSegmentTree (const LineString2dT &lineString) |
| makeIndexedSegmenTree create search tree of segments More... | |
| SegmentSearch | lanelet::geometry::internal::makeTree (const std::vector< BasicLineString2d > &convexSubStrings) |
| makeTree create search tree of segments from line strings More... | |
| template<typename LineString2dT > | |
| PointVincinity | lanelet::geometry::internal::makeVincinity (const LineString2dT &lineString, const size_t idx) |
| makeVincinity create pair of preceding and following point on a line string More... | |
| template<typename LineStringT > | |
| traits::PointType< LineStringT > | lanelet::geometry::nearestPointAtDistance (LineStringT lineString, double dist) |
| returns the cosest point to a position on the linestring More... | |
| template<typename LineString2dT > | |
| BasicLineString2d | lanelet::geometry::offset (const LineString2dT &lineString, double distance) |
| create a linestring that is offset to the original one. Guarantees no self-intersections and no inversions in the result. More... | |
| template<typename LineString2dT > | |
| BasicLineString2d | lanelet::geometry::offsetNoThrow (const LineString2dT &lineString, double distance) |
| create a linestring that is offset to the original one. the result. More... | |
| template<typename PointT > | |
| bool | lanelet::geometry::internal::pointIsLeftOf (const PointT &pSeg1, const PointT &pSeg2, const PointT &p) |
| BasicPoint2d | lanelet::geometry::internal::project (const BasicLineString2d &lineString, const BasicPoint2d &pointToProject) |
| BasicPoint3d | lanelet::geometry::internal::project (const BasicLineString3d &lineString, const BasicPoint3d &pointToProject) |
| BasicPoint2d | lanelet::geometry::internal::project (const ConstHybridLineString2d &lineString, const BasicPoint2d &pointToProject) |
| BasicPoint3d | lanelet::geometry::internal::project (const ConstHybridLineString3d &lineString, const BasicPoint3d &pointToProject) |
| BasicPoint2d | lanelet::geometry::internal::project (const CompoundHybridLineString2d &lineString, const BasicPoint2d &pointToProject) |
| BasicPoint3d | lanelet::geometry::internal::project (const CompoundHybridLineString3d &lineString, const BasicPoint3d &pointToProject) |
| template<typename LineString3dT , typename > | |
| BasicPoint3d | lanelet::geometry::project (const LineString3dT &lineString, const BasicPoint3d &pointToProject) |
| Projects the given point in 3d to the LineString. More... | |
| template<typename LineString2dT , typename > | |
| BasicPoint2d | lanelet::geometry::project (const LineString2dT &lineString, const BasicPoint2d &pointToProject) |
| Projects the given point in 2d to the LineString. More... | |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const ConstHybridLineString2d &l1, const ConstHybridLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const CompoundHybridLineString2d &l1, const CompoundHybridLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const ConstHybridLineString2d &l1, const CompoundHybridLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const CompoundHybridLineString2d &l1, const ConstHybridLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const ConstHybridLineString2d &l1, const BasicLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const BasicLineString2d &l1, const ConstHybridLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const BasicLineString2d &l1, const BasicLineString2d &l2) |
| template<typename LineString2dT > | |
| IfLS< LineString2dT, std::pair< BasicPoint2d, BasicPoint2d > > | lanelet::geometry::projectedPoint2d (const LineString2dT &l1, const LineString2dT &l2) |
| Computes the projected points on the two linestrings for the shortest distance. More... | |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const ConstHybridLineString3d &l1, const ConstHybridLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const CompoundHybridLineString3d &l1, const CompoundHybridLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const ConstHybridLineString3d &l1, const CompoundHybridLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const CompoundHybridLineString3d &l1, const ConstHybridLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const ConstHybridLineString3d &l1, const BasicLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const BasicLineString3d &l1, const ConstHybridLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const BasicLineString3d &l1, const BasicLineString3d &l2) |
| template<typename LineString3dT > | |
| IfLS< LineString3dT, std::pair< BasicPoint3d, BasicPoint3d > > | lanelet::geometry::projectedPoint3d (const LineString3dT &l1, const LineString3dT &l2) |
| Computes the projected points on the two linestrings for the shortest distance. More... | |
| template<typename LineStringIterator > | |
| double | lanelet::geometry::rangedLength (LineStringIterator start, LineStringIterator end) |
| BasicLineString2d | lanelet::geometry::internal::removeSelfIntersections (const BasicLineString2d &lineString) |
| template<typename LineString2dT > | |
| BasicLineString2d | lanelet::geometry::internal::shiftConvexSharp (const LineString2dT &lineString, const size_t idx, const double distance, const PointVincinity &pv) |
| shiftConvexSharp shift corner that is convex at a more than 90 degree angle. Inserts a new point to limit maximum offset More... | |
| template<typename LineString2dT > | |
| BasicPoint2d | lanelet::geometry::internal::shiftLateral (const LineString2dT &lineString, const size_t idx, const double offset, const PointVincinity &pv) |
| shiftLateral shift point along the bisectrix More... | |
| template<typename LineString2dT > | |
| BasicPoint2d | lanelet::geometry::internal::shiftPerpendicular (const LineString2dT &lineString, const size_t idx, const double distance, const bool asLast, const PointVincinity &pv) |
| shiftPerpendicular shift point perpendicular to either the preceding or following segment More... | |
| template<typename LineString2dT > | |
| std::pair< BasicLineString2d, bool > | lanelet::geometry::internal::shiftPoint (const LineString2dT &lineString, const double distance, const size_t idx, const PointVincinity &pv) |
| shiftPoint in lateral direction More... | |
| template<typename LineString3dT > | |
| double | lanelet::geometry::signedDistance (const LineString3dT &lineString, const BasicPoint3d &p) |
| template<typename LineString2dT > | |
| double | lanelet::geometry::signedDistance (const LineString2dT &lineString, const BasicPoint2d &p) |
| template<typename LineStringT , typename PointT > | |
| std::pair< double, ProjectedPointInfo< traits::BasicPointT< PointT > > > | lanelet::geometry::internal::signedDistanceImpl (const LineStringT lineString, const PointT &p) |
| template<typename LineStringT > | |
| BasicPoints2d | lanelet::geometry::internal::sortAlongS (const LineStringT &ls, const BasicPoints2d &points) |
| template<typename LineString2dT > | |
| ArcCoordinates | lanelet::geometry::toArcCoordinates (const LineString2dT &lineString, const BasicPoint2d &point) |
| Transform a point to the coordinates of the linestring. More... | |