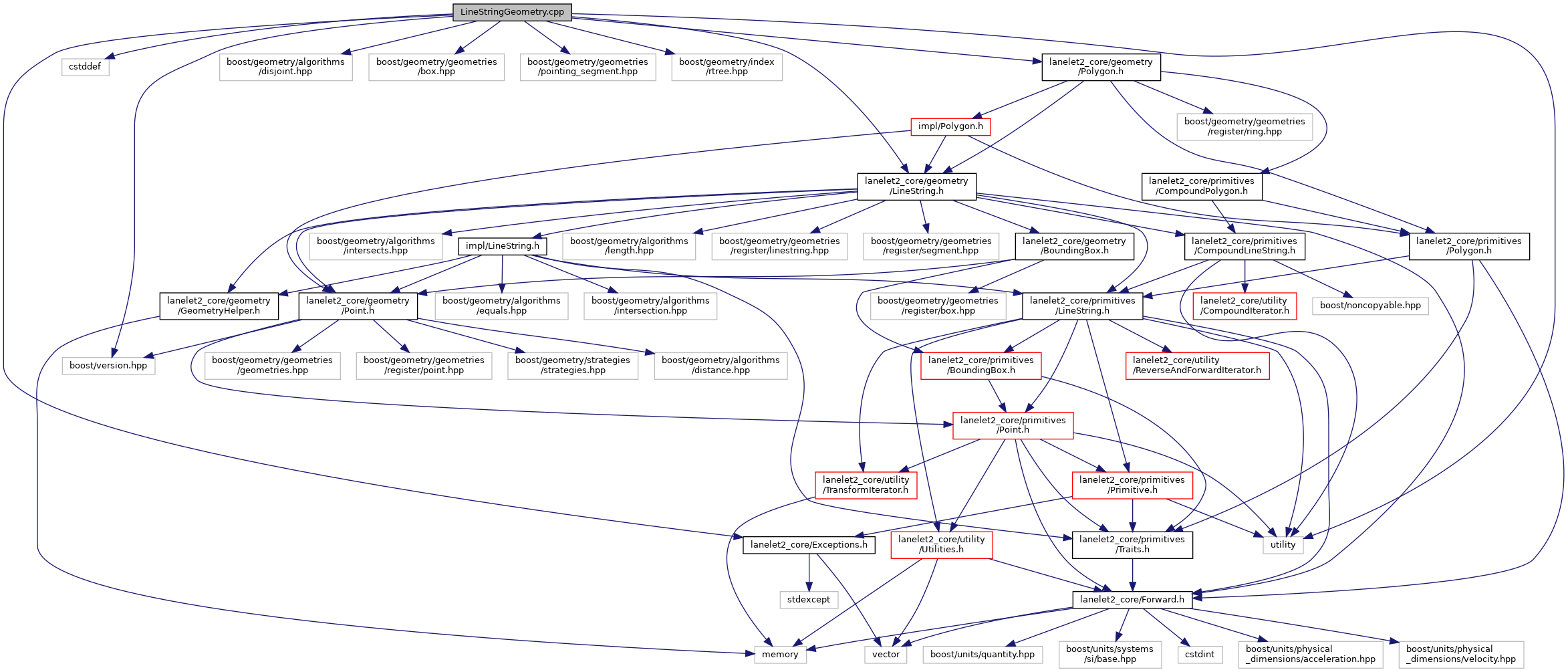
#include <boost/version.hpp>#include <cstddef>#include <utility>#include <boost/geometry/algorithms/disjoint.hpp>#include <boost/geometry/geometries/box.hpp>#include <boost/geometry/geometries/pointing_segment.hpp>#include <boost/geometry/index/rtree.hpp>#include "lanelet2_core/Exceptions.h"#include "lanelet2_core/geometry/LineString.h"#include "lanelet2_core/geometry/Polygon.h"
Include dependency graph for LineStringGeometry.cpp:
Go to the source code of this file.
Namespaces | |
| lanelet | |
| lanelet::geometry | |
| lanelet::geometry::internal | |
Functions | |
| Segment< BasicPoint2d > | lanelet::geometry::closestSegment (const BasicLineString2d &lineString, const BasicPoint2d &pointToProject) |
| find the segment on a 2d line string that is closest to a given point, determined by boost::geometry::distance More... | |
| Segment< BasicPoint3d > | lanelet::geometry::closestSegment (const BasicLineString3d &lineString, const BasicPoint3d &pointToProject) |
| find the segment on a 3d line string that is closest to a given point, determined by boost::geometry::distance More... | |
| Segment< ConstPoint2d > | lanelet::geometry::closestSegment (const ConstLineString2d &lineString, const BasicPoint2d &pointToProject) |
| Segment< ConstPoint3d > | lanelet::geometry::closestSegment (const ConstLineString3d &lineString, const BasicPoint3d &pointToProject) |
| Segment< BasicPoint2d > | lanelet::geometry::closestSegment (const ConstHybridLineString2d &lineString, const BasicPoint2d &pointToProject) |
| Segment< BasicPoint3d > | lanelet::geometry::closestSegment (const ConstHybridLineString3d &lineString, const BasicPoint3d &pointToProject) |
| Segment< ConstPoint2d > | lanelet::geometry::closestSegment (const CompoundLineString2d &lineString, const BasicPoint2d &pointToProject) |
| Segment< ConstPoint3d > | lanelet::geometry::closestSegment (const CompoundLineString3d &lineString, const BasicPoint3d &pointToProject) |
| Segment< BasicPoint2d > | lanelet::geometry::closestSegment (const CompoundHybridLineString2d &lineString, const BasicPoint2d &pointToProject) |
| Segment< BasicPoint3d > | lanelet::geometry::closestSegment (const CompoundHybridLineString3d &lineString, const BasicPoint3d &pointToProject) |
| BasicPoint2d | lanelet::geometry::internal::project (const BasicLineString2d &lineString, const BasicPoint2d &pointToProject) |
| BasicPoint3d | lanelet::geometry::internal::project (const BasicLineString3d &lineString, const BasicPoint3d &pointToProject) |
| BasicPoint2d | lanelet::geometry::internal::project (const ConstHybridLineString2d &lineString, const BasicPoint2d &pointToProject) |
| BasicPoint3d | lanelet::geometry::internal::project (const ConstHybridLineString3d &lineString, const BasicPoint3d &pointToProject) |
| BasicPoint2d | lanelet::geometry::internal::project (const CompoundHybridLineString2d &lineString, const BasicPoint2d &pointToProject) |
| BasicPoint3d | lanelet::geometry::internal::project (const CompoundHybridLineString3d &lineString, const BasicPoint3d &pointToProject) |
| BasicPoint2d | lanelet::geometry::project (const BasicSegment2d &segment, const BasicPoint2d &pointToProject) |
| BasicPoint3d | lanelet::geometry::project (const BasicSegment3d &segment, const BasicPoint3d &pointToProject) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedBorderPoint2d (const ConstHybridPolygon2d &l1, const ConstHybridPolygon2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedBorderPoint2d (const CompoundHybridPolygon2d &l1, const CompoundHybridPolygon2d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedBorderPoint3d (const ConstHybridPolygon3d &l1, const ConstHybridPolygon3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedBorderPoint3d (const CompoundHybridPolygon3d &l1, const CompoundHybridPolygon3d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const ConstHybridLineString2d &l1, const ConstHybridLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const CompoundHybridLineString2d &l1, const CompoundHybridLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const ConstHybridLineString2d &l1, const CompoundHybridLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const CompoundHybridLineString2d &l1, const ConstHybridLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const ConstHybridLineString2d &l1, const BasicLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const BasicLineString2d &l1, const ConstHybridLineString2d &l2) |
| std::pair< BasicPoint2d, BasicPoint2d > | lanelet::geometry::internal::projectedPoint2d (const BasicLineString2d &l1, const BasicLineString2d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const ConstHybridLineString3d &l1, const ConstHybridLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const CompoundHybridLineString3d &l1, const CompoundHybridLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const ConstHybridLineString3d &l1, const CompoundHybridLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const CompoundHybridLineString3d &l1, const ConstHybridLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const ConstHybridLineString3d &l1, const BasicLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const BasicLineString3d &l1, const ConstHybridLineString3d &l2) |
| std::pair< BasicPoint3d, BasicPoint3d > | lanelet::geometry::internal::projectedPoint3d (const BasicLineString3d &l1, const BasicLineString3d &l2) |
Variable Documentation
◆ distance
| Optional<double> distance |
Definition at line 168 of file LineStringGeometry.cpp.
◆ p
| BasicPoint p {} |
Definition at line 196 of file LineStringGeometry.cpp.
◆ p1
| BasicPoint p1 |
Definition at line 166 of file LineStringGeometry.cpp.
◆ p2
| BasicPoint p2 |
Definition at line 167 of file LineStringGeometry.cpp.
◆ sD
| double sD |
Definition at line 23 of file LineStringGeometry.cpp.
◆ segm
| Segm segm {} |
Definition at line 195 of file LineStringGeometry.cpp.
◆ segm1
| Segm1 segm1 |
Definition at line 164 of file LineStringGeometry.cpp.
◆ segm2
| Segm2 segm2 |
Definition at line 165 of file LineStringGeometry.cpp.
◆ sN
| double sN |
Definition at line 22 of file LineStringGeometry.cpp.
◆ tD
| double tD |
Definition at line 25 of file LineStringGeometry.cpp.
◆ tN
| double tN |
Definition at line 24 of file LineStringGeometry.cpp.