#include <boost/geometry/algorithms/intersects.hpp>#include <boost/geometry/algorithms/length.hpp>#include <boost/geometry/geometries/register/linestring.hpp>#include <boost/geometry/geometries/register/segment.hpp>#include "lanelet2_core/Forward.h"#include "lanelet2_core/geometry/BoundingBox.h"#include "lanelet2_core/geometry/GeometryHelper.h"#include "lanelet2_core/geometry/Point.h"#include "lanelet2_core/primitives/CompoundLineString.h"#include "lanelet2_core/primitives/LineString.h"#include "impl/LineString.h"
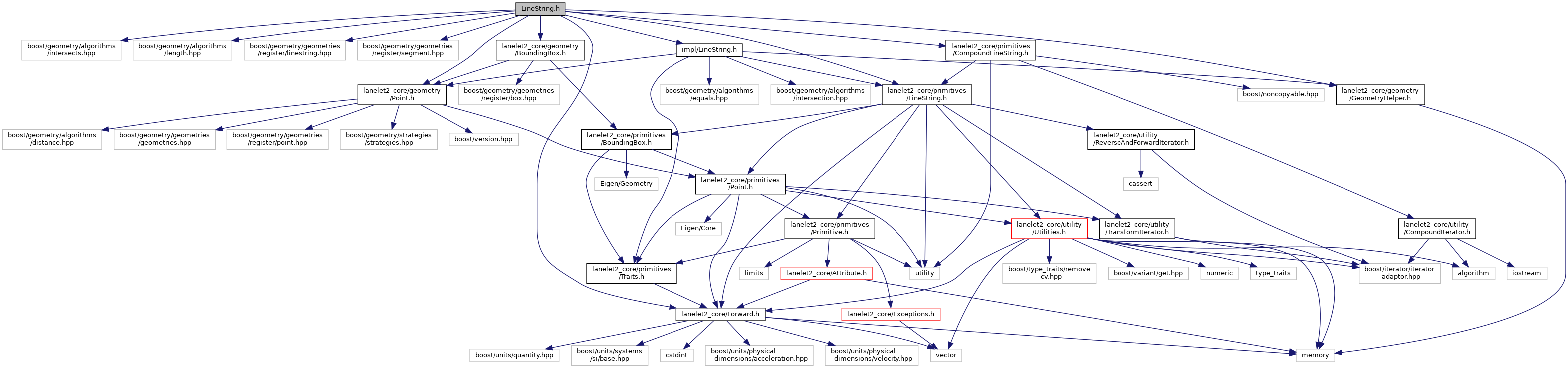
Include dependency graph for geometry/LineString.h:
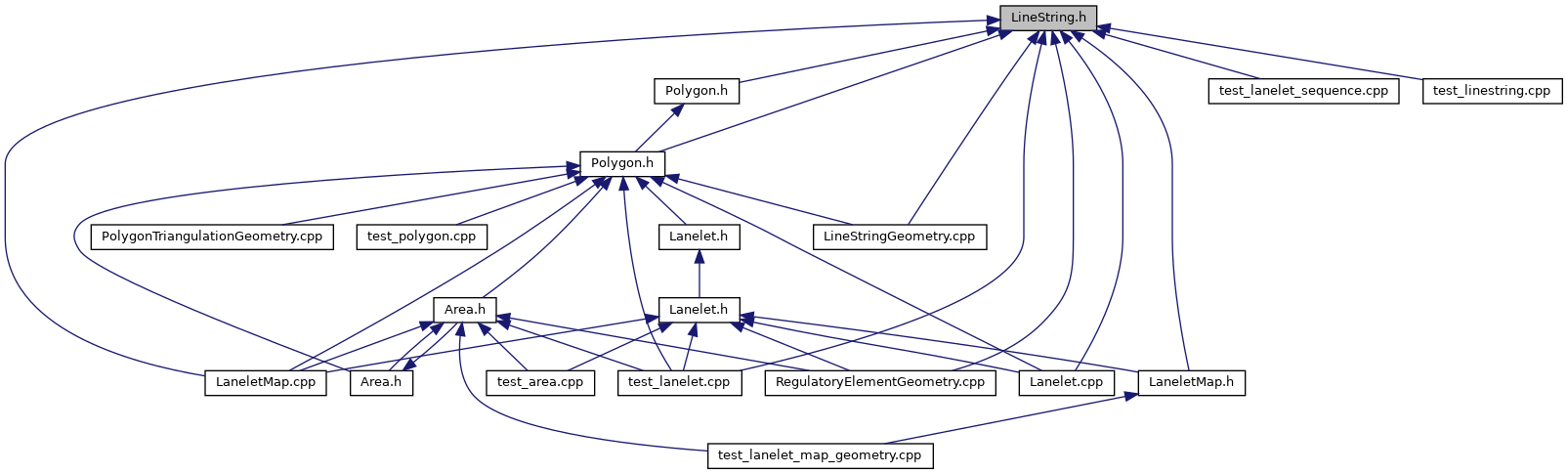
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| lanelet | |
| lanelet::geometry | |
Functions | |
| template<typename LineStringT > | |
| std::vector< double > | lanelet::geometry::accumulatedLengthRatios (const LineStringT &lineString) |
| template<typename LineString1T , typename LineString2T > | |
| std::pair< LineString1T, LineString2T > | lanelet::geometry::align (LineString1T left, LineString2T right) |
| inverts the two linestrings such that they are parallel More... | |
| template<typename LineString2dT > | |
| IfLS< LineString2dT, BoundingBox2d > | lanelet::geometry::boundingBox2d (const LineString2dT &lineString) |
| Get the surrounding axis-aligned bounding box in 2d. More... | |
| template<typename LineString3dT > | |
| IfLS< LineString3dT, BoundingBox3d > | lanelet::geometry::boundingBox3d (const LineString3dT &lineString) |
| Get the surrounding axis-aligned bounding box in 3d. More... | |
| Segment< BasicPoint2d > | lanelet::geometry::closestSegment (const BasicLineString2d &lineString, const BasicPoint2d &pointToProject) |
| find the segment on a 2d line string that is closest to a given point, determined by boost::geometry::distance More... | |
| Segment< BasicPoint3d > | lanelet::geometry::closestSegment (const BasicLineString3d &lineString, const BasicPoint3d &pointToProject) |
| find the segment on a 3d line string that is closest to a given point, determined by boost::geometry::distance More... | |
| Segment< ConstPoint2d > | lanelet::geometry::closestSegment (const ConstLineString2d &lineString, const BasicPoint2d &pointToProject) |
| Segment< ConstPoint3d > | lanelet::geometry::closestSegment (const ConstLineString3d &lineString, const BasicPoint3d &pointToProject) |
| Segment< BasicPoint2d > | lanelet::geometry::closestSegment (const ConstHybridLineString2d &lineString, const BasicPoint2d &pointToProject) |
| Segment< BasicPoint3d > | lanelet::geometry::closestSegment (const ConstHybridLineString3d &lineString, const BasicPoint3d &pointToProject) |
| Segment< ConstPoint2d > | lanelet::geometry::closestSegment (const CompoundLineString2d &lineString, const BasicPoint2d &pointToProject) |
| Segment< ConstPoint3d > | lanelet::geometry::closestSegment (const CompoundLineString3d &lineString, const BasicPoint3d &pointToProject) |
| Segment< BasicPoint2d > | lanelet::geometry::closestSegment (const CompoundHybridLineString2d &lineString, const BasicPoint2d &pointToProject) |
| Segment< BasicPoint3d > | lanelet::geometry::closestSegment (const CompoundHybridLineString3d &lineString, const BasicPoint3d &pointToProject) |
| template<typename Point2dT > | |
| double | lanelet::geometry::curvature2d (const Point2dT &p1, const Point2dT &p2, const Point2dT &p3) |
| template<typename LineString2dT > | |
| BasicPoint2d | lanelet::geometry::fromArcCoordinates (const LineString2dT &lineString, const ArcCoordinates &arcCoords) |
| create a point by moving laterally arcCoords.distance from the linestring point at arcCoords.length More... | |
| template<typename LineStringT > | |
| traits::BasicPointT< traits::PointType< LineStringT > > | lanelet::geometry::interpolatedPointAtDistance (LineStringT lineString, double dist) |
| template<typename LineString3dT > | |
| IfLS< LineString3dT, bool > | lanelet::geometry::intersects3d (const LineString3dT &linestring, const LineString3dT &otherLinestring, double heightTolerance=3.) |
| test whether two linestrings intersect in 3d. More... | |
| template<typename LineStringT > | |
| std::vector< double > | lanelet::geometry::lengthRatios (const LineStringT &lineString) |
| template<typename LineStringT > | |
| traits::PointType< LineStringT > | lanelet::geometry::nearestPointAtDistance (LineStringT lineString, double dist) |
| returns the cosest point to a position on the linestring More... | |
| template<typename LineString2dT > | |
| BasicLineString2d | lanelet::geometry::offset (const LineString2dT &lineString, double distance) |
| create a linestring that is offset to the original one. Guarantees no self-intersections and no inversions in the result. More... | |
| template<typename LineString2dT > | |
| BasicLineString2d | lanelet::geometry::offsetNoThrow (const LineString2dT &lineString, double distance) |
| create a linestring that is offset to the original one. the result. More... | |
| BasicPoint2d | lanelet::geometry::project (const BasicSegment2d &segment, const BasicPoint2d &pointToProject) |
| BasicPoint3d | lanelet::geometry::project (const BasicSegment3d &segment, const BasicPoint3d &pointToProject) |
| template<typename LineString3dT , typename > | |
| BasicPoint3d | lanelet::geometry::project (const LineString3dT &lineString, const BasicPoint3d &pointToProject) |
| Projects the given point in 3d to the LineString. More... | |
| template<typename LineString2dT , typename > | |
| BasicPoint2d | lanelet::geometry::project (const LineString2dT &lineString, const BasicPoint2d &pointToProject) |
| Projects the given point in 2d to the LineString. More... | |
| template<typename LineString2dT > | |
| IfLS< LineString2dT, std::pair< BasicPoint2d, BasicPoint2d > > | lanelet::geometry::projectedPoint2d (const LineString2dT &l1, const LineString2dT &l2) |
| Computes the projected points on the two linestrings for the shortest distance. More... | |
| template<typename LineString3dT > | |
| IfLS< LineString3dT, std::pair< BasicPoint3d, BasicPoint3d > > | lanelet::geometry::projectedPoint3d (const LineString3dT &l1, const LineString3dT &l2) |
| Computes the projected points on the two linestrings for the shortest distance. More... | |
| template<typename LineStringIterator > | |
| double | lanelet::geometry::rangedLength (LineStringIterator start, LineStringIterator end) |
| template<typename LineString3dT > | |
| double | lanelet::geometry::signedDistance (const LineString3dT &lineString, const BasicPoint3d &p) |
| template<typename LineString2dT > | |
| double | lanelet::geometry::signedDistance (const LineString2dT &lineString, const BasicPoint2d &p) |
| template<typename LineString2dT > | |
| ArcCoordinates | lanelet::geometry::toArcCoordinates (const LineString2dT &lineString, const BasicPoint2d &point) |
| Transform a point to the coordinates of the linestring. More... | |