#include <boost/tuple/tuple.hpp>#include <boost/unordered/unordered_set.hpp>#include <pcl/point_types.h>#include <pcl/point_cloud.h>#include <pcl/PointIndices.h>#include <opencv2/opencv.hpp>#include <ros/ros.h>
Include dependency graph for ann_grid.h:

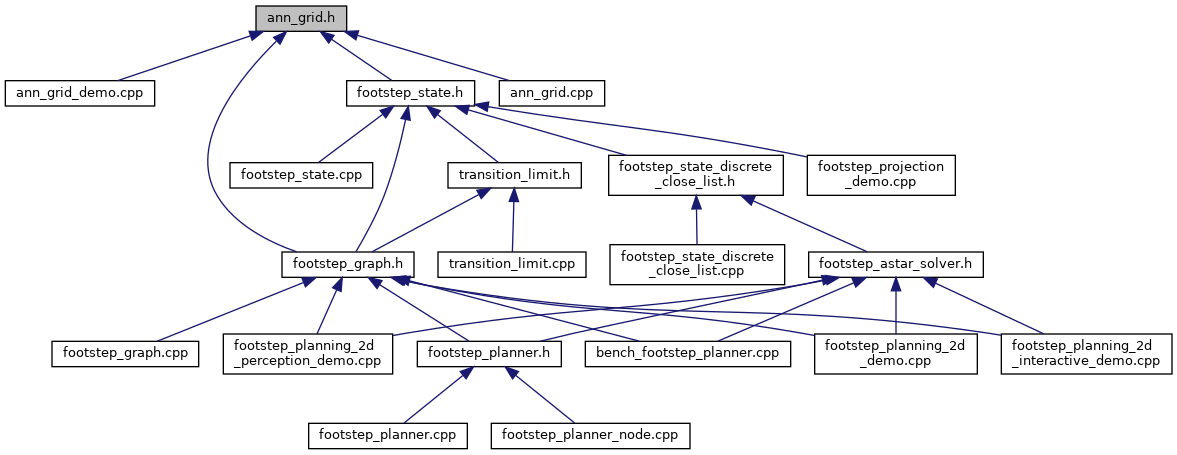
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | jsk_footstep_planner::ANNGrid |
| ANNGrid is a class to provide approximate near neighbors search based on 2.5-D representation. All the z values of pointcloud is ignored and it sorted as 2-D array. More... | |
| class | jsk_footstep_planner::ANNGridCell |
Namespaces | |
| jsk_footstep_planner | |