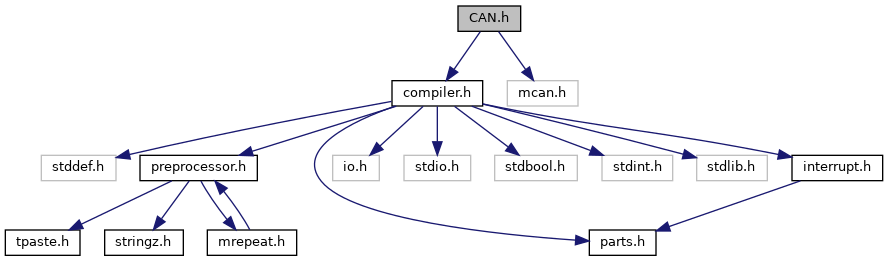
#include "compiler.h"
#include "mcan.h"
Go to the source code of this file.
◆ CAN_init()
◆ CAN_set_baudrate()
| void CAN_set_baudrate |
( |
uint32_t |
baudrate | ) |
|
◆ mcan_receive_message()
| uint8_t mcan_receive_message |
( |
uint32_t * |
id_value, |
|
|
uint8_t * |
data |
|
) |
| |
◆ mcan_send_message()
| bool mcan_send_message |
( |
uint32_t |
id_value, |
|
|
uint8_t * |
data, |
|
|
uint32_t |
data_length |
|
) |
| |
◆ mcan_set_rx_filter()
| int mcan_set_rx_filter |
( |
uint32_t |
id_value | ) |
|
◆ mcan_test_master()
| void mcan_test_master |
( |
void |
| ) |
|
◆ mcan_test_slave()
| void mcan_test_slave |
( |
void |
| ) |
|