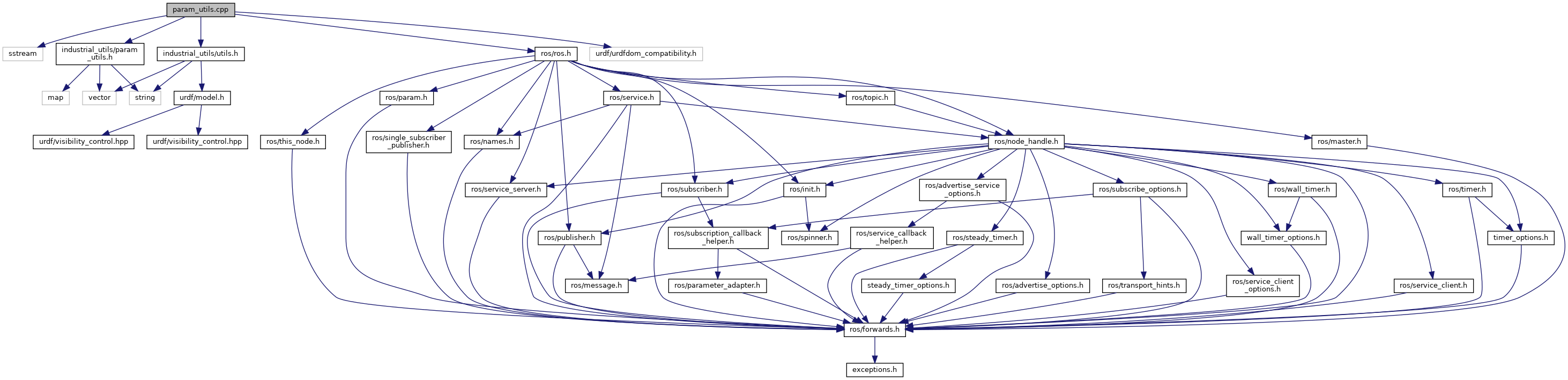
#include <sstream>#include "industrial_utils/param_utils.h"#include "industrial_utils/utils.h"#include "ros/ros.h"#include <urdf/urdfdom_compatibility.h>
Include dependency graph for param_utils.cpp:
Go to the source code of this file.
Namespaces | |
| industrial_utils | |
| industrial_utils::param | |
Functions | |
| bool | industrial_utils::param::getJointNames (const std::string joint_list_param, const std::string urdf_param, std::vector< std::string > &joint_names) |
| Tries to get a set of joint names using several fallback methods: 1) check parameter for an explicit list 2) try to parse from given URDF data 3) use default joint names: ["joint_1", "joint_2", ..., "joint_6"]. More... | |
| bool | industrial_utils::param::getJointVelocityLimits (const std::string urdf_param_name, std::map< std::string, double > &velocity_limits) |
| Tries to read joint velocity limits from the specified URDF parameter. More... | |
| bool | industrial_utils::param::getListParam (const std::string param_name, std::vector< std::string > &list_param) |
| Gets parameter list as vector of strings. More... | |
| std::string | industrial_utils::param::vec2str (const std::vector< std::string > &vec) |