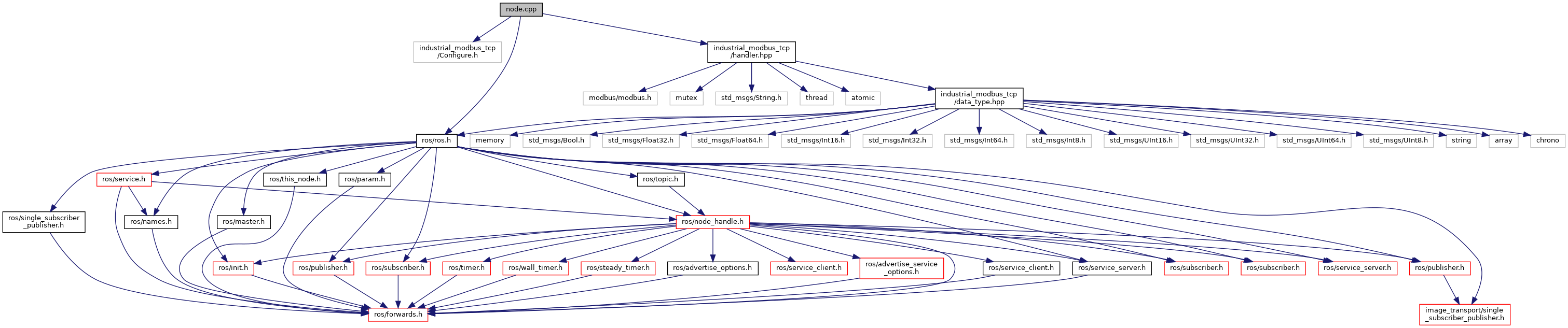
#include <industrial_modbus_tcp/Configure.h>
#include <industrial_modbus_tcp/handler.hpp>
#include <ros/ros.h>
Go to the source code of this file.
|
| bool | configureModbusCallback (industrial_modbus_tcp::ConfigureRequest &req, industrial_modbus_tcp::ConfigureResponse &res) |
| |
| int | main (int argc, char *argv[]) |
| |
◆ configureModbusCallback()
| bool configureModbusCallback |
( |
industrial_modbus_tcp::ConfigureRequest & |
req, |
|
|
industrial_modbus_tcp::ConfigureResponse & |
res |
|
) |
| |
◆ main()
| int main |
( |
int |
argc, |
|
|
char * |
argv[] |
|
) |
| |
◆ base_topic
◆ error_pub
◆ modbus_handlers
| std::vector<std::shared_ptr<Handler> > modbus_handlers |
◆ nh