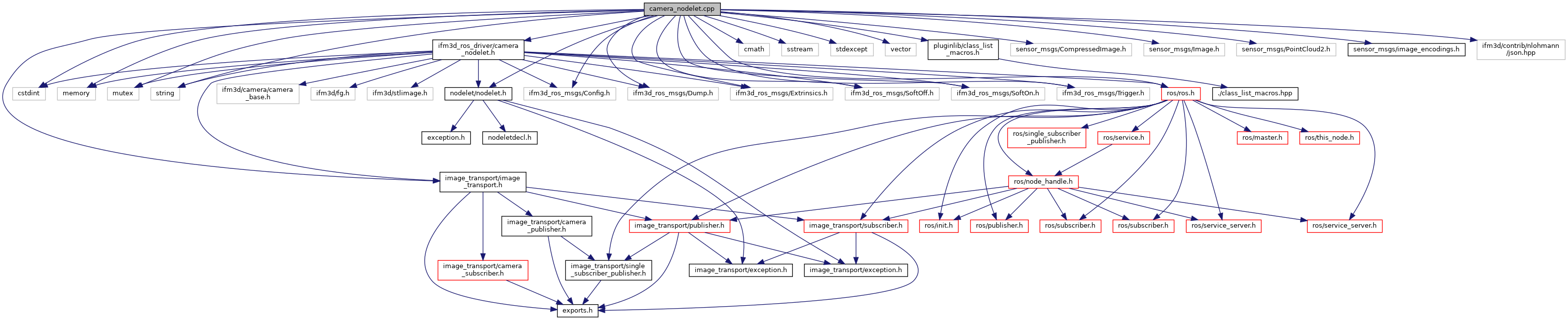
#include <ifm3d_ros_driver/camera_nodelet.h>#include <cmath>#include <cstdint>#include <memory>#include <mutex>#include <sstream>#include <stdexcept>#include <string>#include <vector>#include <image_transport/image_transport.h>#include <nodelet/nodelet.h>#include <pluginlib/class_list_macros.h>#include <ros/ros.h>#include <sensor_msgs/CompressedImage.h>#include <sensor_msgs/Image.h>#include <sensor_msgs/PointCloud2.h>#include <sensor_msgs/image_encodings.h>#include <ifm3d_ros_msgs/Config.h>#include <ifm3d_ros_msgs/Dump.h>#include <ifm3d_ros_msgs/Extrinsics.h>#include <ifm3d_ros_msgs/SoftOff.h>#include <ifm3d_ros_msgs/SoftOn.h>#include <ifm3d_ros_msgs/Trigger.h>#include <ifm3d/contrib/nlohmann/json.hpp>
Include dependency graph for camera_nodelet.cpp:
Go to the source code of this file.
Typedefs | |
| using | json = nlohmann::json |
Functions | |
| sensor_msgs::PointCloud2 | ifm3d_to_ros_cloud (ifm3d::Image &image, const std_msgs::Header &header, const std::string &logger) |
| sensor_msgs::PointCloud2 | ifm3d_to_ros_cloud (ifm3d::Image &&image, const std_msgs::Header &header, const std::string &logger) |
| sensor_msgs::CompressedImage | ifm3d_to_ros_compressed_image (ifm3d::Image &image, const std_msgs::Header &header, const std::string &format, const std::string &logger) |
| sensor_msgs::CompressedImage | ifm3d_to_ros_compressed_image (ifm3d::Image &&image, const std_msgs::Header &header, const std::string &format, const std::string &logger) |
| sensor_msgs::Image | ifm3d_to_ros_image (ifm3d::Image &image, const std_msgs::Header &header, const std::string &logger) |
| sensor_msgs::Image | ifm3d_to_ros_image (ifm3d::Image &&image, const std_msgs::Header &header, const std::string &logger) |
Typedef Documentation
◆ json
| using json = nlohmann::json |
Definition at line 192 of file camera_nodelet.cpp.
Function Documentation
◆ ifm3d_to_ros_cloud() [1/2]
| sensor_msgs::PointCloud2 ifm3d_to_ros_cloud | ( | ifm3d::Image & | image, |
| const std_msgs::Header & | header, | ||
| const std::string & | logger | ||
| ) |
Definition at line 132 of file camera_nodelet.cpp.
◆ ifm3d_to_ros_cloud() [2/2]
| sensor_msgs::PointCloud2 ifm3d_to_ros_cloud | ( | ifm3d::Image && | image, |
| const std_msgs::Header & | header, | ||
| const std::string & | logger | ||
| ) |
Definition at line 186 of file camera_nodelet.cpp.
◆ ifm3d_to_ros_compressed_image() [1/2]
| sensor_msgs::CompressedImage ifm3d_to_ros_compressed_image | ( | ifm3d::Image & | image, |
| const std_msgs::Header & | header, | ||
| const std::string & | format, | ||
| const std::string & | logger | ||
| ) |
Definition at line 101 of file camera_nodelet.cpp.
◆ ifm3d_to_ros_compressed_image() [2/2]
| sensor_msgs::CompressedImage ifm3d_to_ros_compressed_image | ( | ifm3d::Image && | image, |
| const std_msgs::Header & | header, | ||
| const std::string & | format, | ||
| const std::string & | logger | ||
| ) |
Definition at line 126 of file camera_nodelet.cpp.
◆ ifm3d_to_ros_image() [1/2]
| sensor_msgs::Image ifm3d_to_ros_image | ( | ifm3d::Image & | image, |
| const std_msgs::Header & | header, | ||
| const std::string & | logger | ||
| ) |
Definition at line 35 of file camera_nodelet.cpp.
◆ ifm3d_to_ros_image() [2/2]
| sensor_msgs::Image ifm3d_to_ros_image | ( | ifm3d::Image && | image, |
| const std_msgs::Header & | header, | ||
| const std::string & | logger | ||
| ) |
Definition at line 96 of file camera_nodelet.cpp.