#include <BodyRTC.h>
Public Member Functions | |
| CORBA::Boolean | addJointGroup (const char *gname, const OpenHRP::RobotHardwareService::StrSequence &jnames) |
| void | calibrateInertiaSensor () |
| void | disableDisturbanceObserver () |
| void | enableDisturbanceObserver () |
| void | getStatus (OpenHRP::RobotHardwareService::RobotState_out rs) |
| void | getStatus2 (OpenHRP::RobotHardwareService::RobotState2_out rs) |
| void | initializeJointAngle (const char *name, const char *option) |
| CORBA::Long | lengthDigitalInput () |
| CORBA::Long | lengthDigitalOutput () |
| CORBA::Boolean | power (const char *jname, OpenHRP::RobotHardwareService::SwitchStatus ss) |
| CORBA::Boolean | readDigitalInput (::OpenHRP::RobotHardwareService::OctSequence_out din) |
| CORBA::Boolean | readDigitalOutput (::OpenHRP::RobotHardwareService::OctSequence_out dout) |
| void | removeForceSensorOffset () |
| RobotHardwareServicePort () | |
| CORBA::Boolean | servo (const char *jname, OpenHRP::RobotHardwareService::SwitchStatus ss) |
| void | setDisturbanceObserverGain (::CORBA::Double gain) |
| void | setJointControlMode (const char *jname, OpenHRP::RobotHardwareService::JointControlMode jcm) |
| CORBA::Boolean | setJointInertia (const char *name, ::CORBA::Double mn) |
| void | setJointInertias (const ::OpenHRP::RobotHardwareService::DblSequence &mns) |
| void | setRobot (BodyRTC *i_robot) |
| void | setServoErrorLimit (const char *jname, double limit) |
| void | setServoGainPercentage (const char *jname, double limit) |
| void | setServoTorqueGainPercentage (const char *jname, double limit) |
| CORBA::Boolean | writeDigitalOutput (const ::OpenHRP::RobotHardwareService::OctSequence &dout) |
| CORBA::Boolean | writeDigitalOutputWithMask (const ::OpenHRP::RobotHardwareService::OctSequence &dout, const ::OpenHRP::RobotHardwareService::OctSequence &mask) |
| ~RobotHardwareServicePort () | |
Private Attributes | |
| BodyRTC * | m_robot |
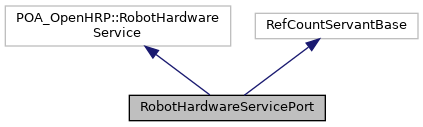
Detailed Description
Constructor & Destructor Documentation
◆ RobotHardwareServicePort()
| RobotHardwareServicePort::RobotHardwareServicePort | ( | ) |
Definition at line 643 of file BodyRTC.cpp.
◆ ~RobotHardwareServicePort()
| RobotHardwareServicePort::~RobotHardwareServicePort | ( | ) |
Definition at line 645 of file BodyRTC.cpp.
Member Function Documentation
◆ addJointGroup()
| CORBA::Boolean RobotHardwareServicePort::addJointGroup | ( | const char * | gname, |
| const OpenHRP::RobotHardwareService::StrSequence & | jnames | ||
| ) |
Definition at line 680 of file BodyRTC.cpp.
◆ calibrateInertiaSensor()
| void RobotHardwareServicePort::calibrateInertiaSensor | ( | ) |
Definition at line 674 of file BodyRTC.cpp.
◆ disableDisturbanceObserver()
| void RobotHardwareServicePort::disableDisturbanceObserver | ( | ) |
Definition at line 721 of file BodyRTC.cpp.
◆ enableDisturbanceObserver()
| void RobotHardwareServicePort::enableDisturbanceObserver | ( | ) |
Definition at line 720 of file BodyRTC.cpp.
◆ getStatus()
| void RobotHardwareServicePort::getStatus | ( | OpenHRP::RobotHardwareService::RobotState_out | rs | ) |
Definition at line 648 of file BodyRTC.cpp.
◆ getStatus2()
| void RobotHardwareServicePort::getStatus2 | ( | OpenHRP::RobotHardwareService::RobotState2_out | rs | ) |
Definition at line 653 of file BodyRTC.cpp.
◆ initializeJointAngle()
Definition at line 678 of file BodyRTC.cpp.
◆ lengthDigitalInput()
| CORBA::Long RobotHardwareServicePort::lengthDigitalInput | ( | ) |
Definition at line 696 of file BodyRTC.cpp.
◆ lengthDigitalOutput()
| CORBA::Long RobotHardwareServicePort::lengthDigitalOutput | ( | ) |
Definition at line 705 of file BodyRTC.cpp.
◆ power()
| CORBA::Boolean RobotHardwareServicePort::power | ( | const char * | jname, |
| OpenHRP::RobotHardwareService::SwitchStatus | ss | ||
| ) |
Definition at line 658 of file BodyRTC.cpp.
◆ readDigitalInput()
| CORBA::Boolean RobotHardwareServicePort::readDigitalInput | ( | ::OpenHRP::RobotHardwareService::OctSequence_out | din | ) |
Definition at line 693 of file BodyRTC.cpp.
◆ readDigitalOutput()
| CORBA::Boolean RobotHardwareServicePort::readDigitalOutput | ( | ::OpenHRP::RobotHardwareService::OctSequence_out | dout | ) |
Definition at line 708 of file BodyRTC.cpp.
◆ removeForceSensorOffset()
| void RobotHardwareServicePort::removeForceSensorOffset | ( | ) |
Definition at line 676 of file BodyRTC.cpp.
◆ servo()
| CORBA::Boolean RobotHardwareServicePort::servo | ( | const char * | jname, |
| OpenHRP::RobotHardwareService::SwitchStatus | ss | ||
| ) |
Definition at line 662 of file BodyRTC.cpp.
◆ setDisturbanceObserverGain()
| void RobotHardwareServicePort::setDisturbanceObserverGain | ( | ::CORBA::Double | gain | ) |
Definition at line 722 of file BodyRTC.cpp.
◆ setJointControlMode()
| void RobotHardwareServicePort::setJointControlMode | ( | const char * | jname, |
| OpenHRP::RobotHardwareService::JointControlMode | jcm | ||
| ) |
Definition at line 672 of file BodyRTC.cpp.
◆ setJointInertia()
| CORBA::Boolean RobotHardwareServicePort::setJointInertia | ( | const char * | name, |
| ::CORBA::Double | mn | ||
| ) |
Definition at line 712 of file BodyRTC.cpp.
◆ setJointInertias()
| void RobotHardwareServicePort::setJointInertias | ( | const ::OpenHRP::RobotHardwareService::DblSequence & | mns | ) |
Definition at line 717 of file BodyRTC.cpp.
◆ setRobot()
Definition at line 724 of file BodyRTC.cpp.
◆ setServoErrorLimit()
Definition at line 669 of file BodyRTC.cpp.
◆ setServoGainPercentage()
Definition at line 665 of file BodyRTC.cpp.
◆ setServoTorqueGainPercentage()
Definition at line 667 of file BodyRTC.cpp.
◆ writeDigitalOutput()
| CORBA::Boolean RobotHardwareServicePort::writeDigitalOutput | ( | const ::OpenHRP::RobotHardwareService::OctSequence & | dout | ) |
Definition at line 699 of file BodyRTC.cpp.
◆ writeDigitalOutputWithMask()
| CORBA::Boolean RobotHardwareServicePort::writeDigitalOutputWithMask | ( | const ::OpenHRP::RobotHardwareService::OctSequence & | dout, |
| const ::OpenHRP::RobotHardwareService::OctSequence & | mask | ||
| ) |
Definition at line 702 of file BodyRTC.cpp.
Member Data Documentation
◆ m_robot
The documentation for this class was generated from the following files: