soft error limiter $Date$ More...
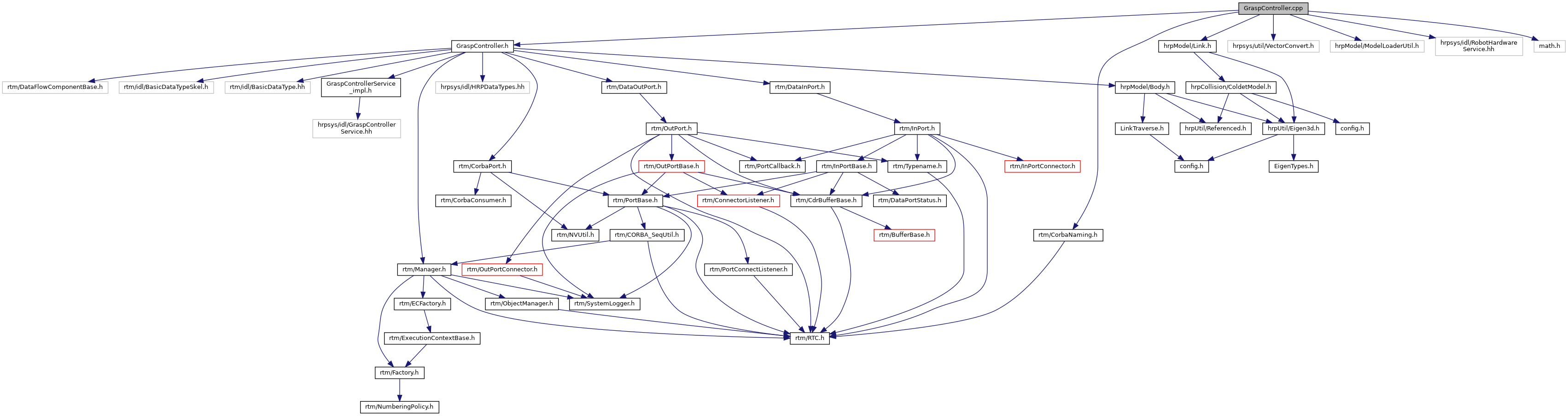
#include "GraspController.h"#include "hrpsys/util/VectorConvert.h"#include <rtm/CorbaNaming.h>#include <hrpModel/ModelLoaderUtil.h>#include "hrpsys/idl/RobotHardwareService.hh"#include <hrpModel/Link.h>#include <math.h>
Include dependency graph for GraspController.cpp:
Go to the source code of this file.
Macros | |
| #define | deg2rad(x) ((x)*M_PI/180) |
| #define | max(a, b) ((a)>(b)?(a):(b)) |
| #define | min(a, b) ((a)<(b)?(a):(b)) |
Functions | |
| void | GraspControllerInit (RTC::Manager *manager) |
Variables | |
| static const char * | softerrorlimiter_spec [] |
Detailed Description
Macro Definition Documentation
◆ deg2rad
Definition at line 19 of file GraspController.cpp.
◆ max
◆ min
Function Documentation
◆ GraspControllerInit()
| void GraspControllerInit | ( | RTC::Manager * | manager | ) |
Definition at line 349 of file GraspController.cpp.
Variable Documentation
◆ softerrorlimiter_spec
|
static |
Initial value:
=
{
"implementation_id", "GraspController",
"type_name", "GraspController",
"description", "soft error limiter",
"version", HRPSYS_PACKAGE_VERSION,
"vendor", "AIST",
"category", "example",
"activity_type", "DataFlowComponent",
"max_instance", "10",
"language", "C++",
"lang_type", "compile",
"conf.default.debugLevel", "0",
""
}
Definition at line 25 of file GraspController.cpp.