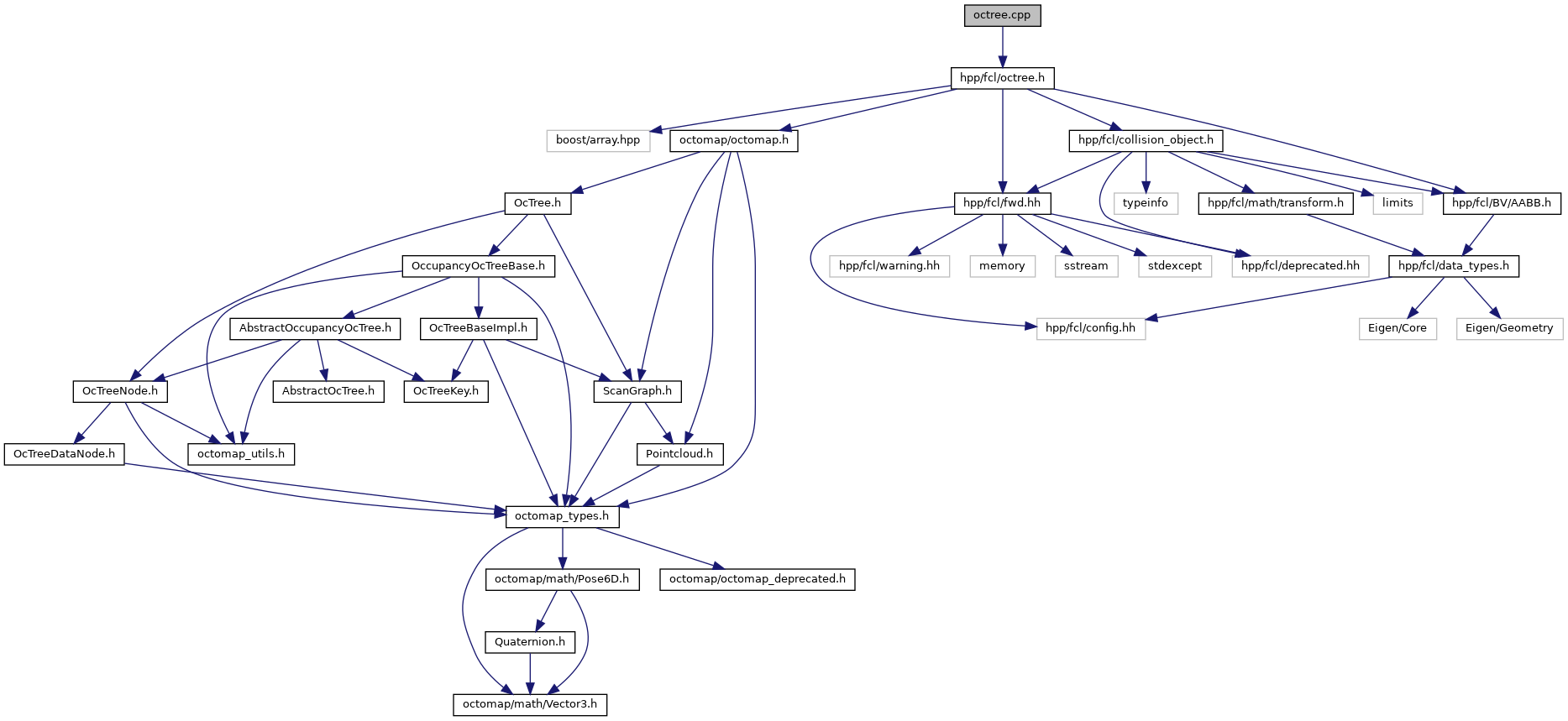
#include <hpp/fcl/octree.h>
Include dependency graph for src/octree.cpp:
Go to the source code of this file.
Classes | |
| struct | hpp::fcl::internal::Neighbors |
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |
| hpp::fcl::internal | |
Functions | |
| void | hpp::fcl::internal::computeNeighbors (const std::vector< boost::array< FCL_REAL, 6 > > &boxes, std::vector< Neighbors > &neighbors) |
| HPP_FCL_DLLAPI OcTreePtr_t | hpp::fcl::makeOctree (const Eigen::Matrix< FCL_REAL, Eigen::Dynamic, 3 > &point_cloud, const FCL_REAL resolution) |
| Build an OcTree from a point cloud and a given resolution. More... | |