Time Pose2 geometry. More...
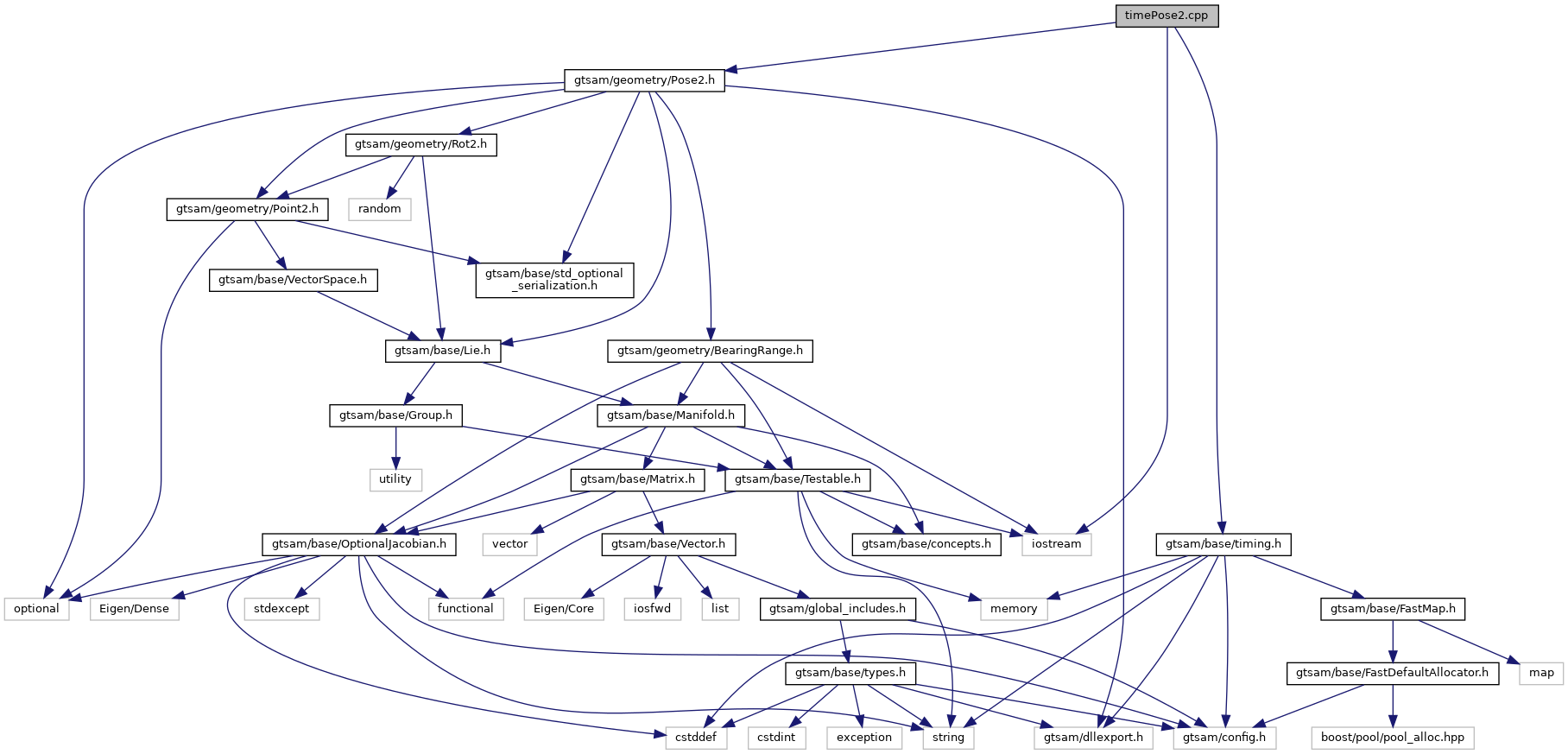
Include dependency graph for timePose2.cpp:
Go to the source code of this file.
Macros | |
| #define | TEST(TITLE, STATEMENT) |
Functions | |
| int | main () |
| Pose2 | Pose2betweenDefault (const Pose2 &r1, const Pose2 &r2) |
| Vector | Pose2BetweenFactorEvaluateErrorDefault (const Pose2 &measured, const Pose2 &p1, const Pose2 &p2, OptionalJacobian< 3, 3 > H1, OptionalJacobian< 3, 3 > H2) |
| Vector | Pose2BetweenFactorEvaluateErrorOptimizedBetween (const Pose2 &measured, const Pose2 &p1, const Pose2 &p2, OptionalJacobian< 3, 3 > H1, OptionalJacobian< 3, 3 > H2) |
| Vector | Pose2BetweenFactorEvaluateErrorOptimizedBetweenFixed (const Pose2 &measured, const Pose2 &p1, const Pose2 &p2, OptionalJacobian< 3, 3 > H1, OptionalJacobian< 3, 3 > H2) |
| Pose2 | Pose2betweenOptimized (const Pose2 &r1, const Pose2 &r2, OptionalJacobian< 3, 3 > H1={}, OptionalJacobian< 3, 3 > H2={}) |
Detailed Description
Time Pose2 geometry.
Definition in file timePose2.cpp.
Macro Definition Documentation
◆ TEST
| #define TEST | ( | TITLE, | |
| STATEMENT | |||
| ) |
Value:
Definition at line 27 of file timePose2.cpp.
Function Documentation
◆ main()
| int main | ( | void | ) |
Definition at line 100 of file timePose2.cpp.
◆ Pose2betweenDefault()
Definition at line 34 of file timePose2.cpp.
◆ Pose2BetweenFactorEvaluateErrorDefault()
| Vector Pose2BetweenFactorEvaluateErrorDefault | ( | const Pose2 & | measured, |
| const Pose2 & | p1, | ||
| const Pose2 & | p2, | ||
| OptionalJacobian< 3, 3 > | H1, | ||
| OptionalJacobian< 3, 3 > | H2 | ||
| ) |
Definition at line 72 of file timePose2.cpp.
◆ Pose2BetweenFactorEvaluateErrorOptimizedBetween()
| Vector Pose2BetweenFactorEvaluateErrorOptimizedBetween | ( | const Pose2 & | measured, |
| const Pose2 & | p1, | ||
| const Pose2 & | p2, | ||
| OptionalJacobian< 3, 3 > | H1, | ||
| OptionalJacobian< 3, 3 > | H2 | ||
| ) |
Definition at line 81 of file timePose2.cpp.
◆ Pose2BetweenFactorEvaluateErrorOptimizedBetweenFixed()
| Vector Pose2BetweenFactorEvaluateErrorOptimizedBetweenFixed | ( | const Pose2 & | measured, |
| const Pose2 & | p1, | ||
| const Pose2 & | p2, | ||
| OptionalJacobian< 3, 3 > | H1, | ||
| OptionalJacobian< 3, 3 > | H2 | ||
| ) |
Definition at line 90 of file timePose2.cpp.
◆ Pose2betweenOptimized()
| Pose2 Pose2betweenOptimized | ( | const Pose2 & | r1, |
| const Pose2 & | r2, | ||
| OptionalJacobian< 3, 3 > | H1 = {}, |
||
| OptionalJacobian< 3, 3 > | H2 = {} |
||
| ) |
Definition at line 39 of file timePose2.cpp.