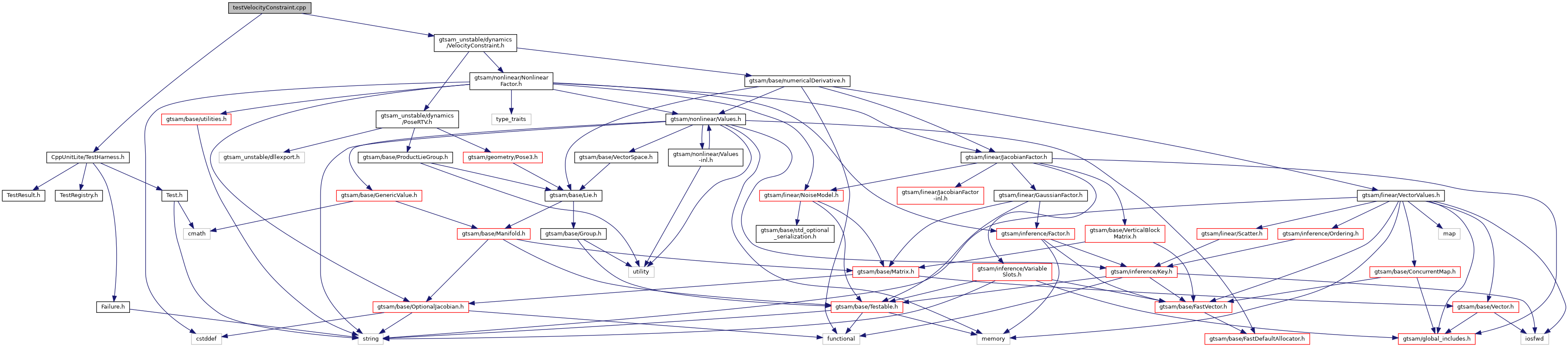
Include dependency graph for testVelocityConstraint.cpp:
Go to the source code of this file.
Functions | |
| int | main () |
| TEST (testVelocityConstraint, trapezoidal) | |
| TEST (testEulerVelocityConstraint, euler_start) | |
| TEST (testEulerVelocityConstraint, euler_end) | |
Variables | |
| const double | dt = 1.0 |
| PoseRTV | origin |
| PoseRTV | pose1 (Point3(0.5, 0.0, 0.0), Rot3(), Velocity3(1.0, 0.0, 0.0)) |
| PoseRTV | pose1a (Point3(0.5, 0.0, 0.0)) |
| PoseRTV | pose2 (Point3(1.5, 0.0, 0.0), Rot3(), Velocity3(1.0, 0.0, 0.0)) |
| const double | tol =1e-5 |
| const Key | x1 = 1 |
| const Key | x2 = 2 |
Function Documentation
◆ main()
| int main | ( | void | ) |
Definition at line 59 of file testVelocityConstraint.cpp.
◆ TEST() [1/3]
| TEST | ( | testVelocityConstraint | , |
| trapezoidal | |||
| ) |
Definition at line 23 of file testVelocityConstraint.cpp.
◆ TEST() [2/3]
| TEST | ( | testEulerVelocityConstraint | , |
| euler_start | |||
| ) |
Definition at line 35 of file testVelocityConstraint.cpp.
◆ TEST() [3/3]
| TEST | ( | testEulerVelocityConstraint | , |
| euler_end | |||
| ) |
Definition at line 47 of file testVelocityConstraint.cpp.
Variable Documentation
◆ dt
| const double dt = 1.0 |
Definition at line 15 of file testVelocityConstraint.cpp.
◆ origin
| PoseRTV origin |
Definition at line 17 of file testVelocityConstraint.cpp.
◆ pose1
◆ pose1a
◆ pose2
◆ tol
| const double tol =1e-5 |
Definition at line 12 of file testVelocityConstraint.cpp.
◆ x1
| const Key x1 = 1 |
Definition at line 14 of file testVelocityConstraint.cpp.
◆ x2
| const Key x2 = 2 |
Definition at line 14 of file testVelocityConstraint.cpp.