Simple example for the structure-from-motion problems. More...
#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/geometry/Cal3_S2.h>
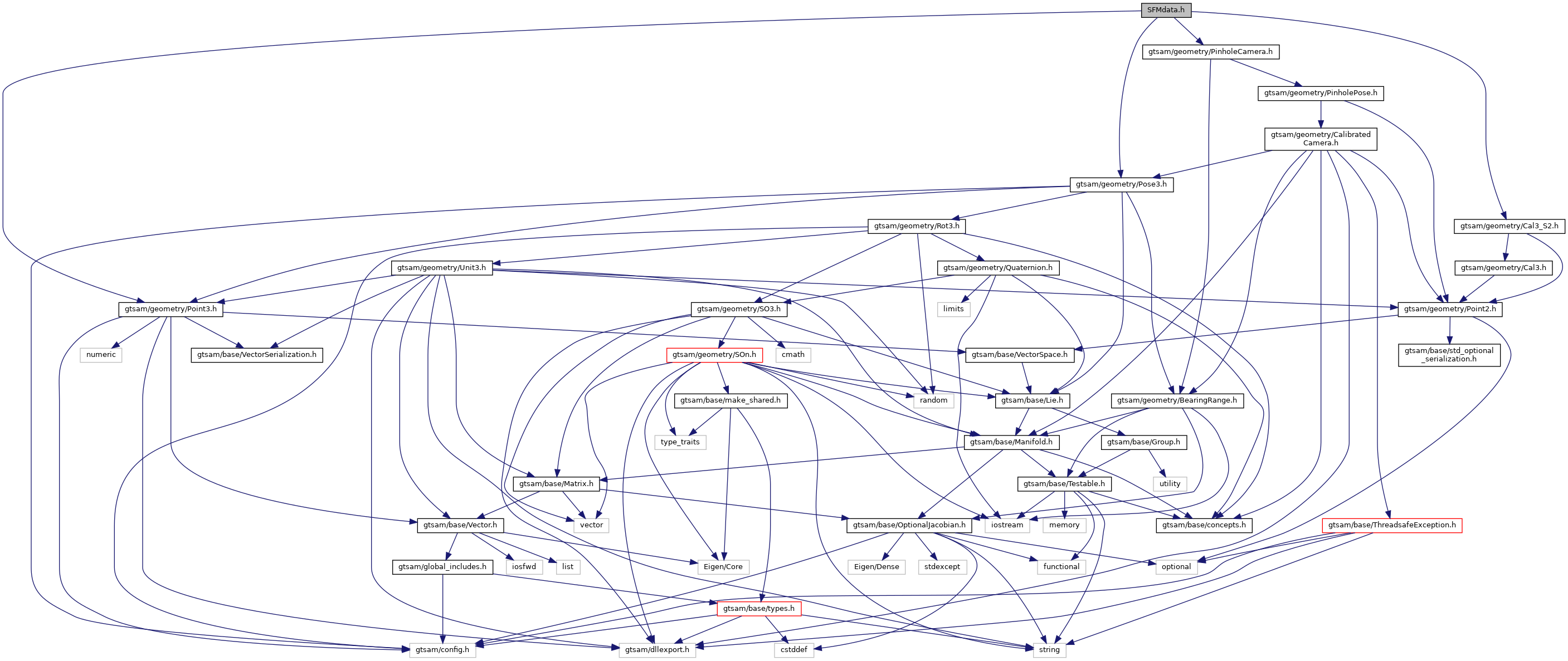
Include dependency graph for SFMdata.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Functions | |
| std::vector< gtsam::Point3 > | createPoints () |
| std::vector< gtsam::Pose3 > | createPoses (const gtsam::Pose3 &init=gtsam::Pose3(gtsam::Rot3::Ypr(M_PI/2, 0,-M_PI/2), gtsam::Point3(30, 0, 0)), const gtsam::Pose3 &delta=gtsam::Pose3(gtsam::Rot3::Ypr(0,-M_PI/4, 0), gtsam::Point3(sin(M_PI/4) *30, 0, 30 *(1-sin(M_PI/4)))), int steps=8) |
Detailed Description
Simple example for the structure-from-motion problems.
Definition in file SFMdata.h.
Function Documentation
◆ createPoints()
| std::vector<gtsam::Point3> createPoints | ( | ) |
A structure-from-motion example with landmarks, default function arguments give
- The landmarks form a 10 meter cube
- The robot rotates around the landmarks, always facing towards the cube Passing function argument allows to specificy an initial position, a pose increment and step count.
◆ createPoses()
| std::vector<gtsam::Pose3> createPoses | ( | const gtsam::Pose3 & | init = gtsam::Pose3(gtsam::Rot3::Ypr(M_PI/2,0,-M_PI/2), gtsam::Point3(30, 0, 0)), |
| const gtsam::Pose3 & | delta = gtsam::Pose3(gtsam::Rot3::Ypr(0,-M_PI/4,0), gtsam::Point3(sin(M_PI/4)*30, 0, 30*(1-sin(M_PI/4)))), |
||
| int | steps = 8 |
||
| ) |