A visualSLAM example for the structure-from-motion problem on a simulated dataset. This version uses a fisheye camera model and a GaussNewton solver to solve the graph in one batch. More...
#include "SFMdata.h"#include <gtsam/geometry/Point2.h>#include <gtsam/inference/Symbol.h>#include <gtsam/nonlinear/GaussNewtonOptimizer.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/geometry/Cal3Fisheye.h>#include <gtsam/slam/PriorFactor.h>#include <gtsam/slam/ProjectionFactor.h>#include <fstream>#include <vector>
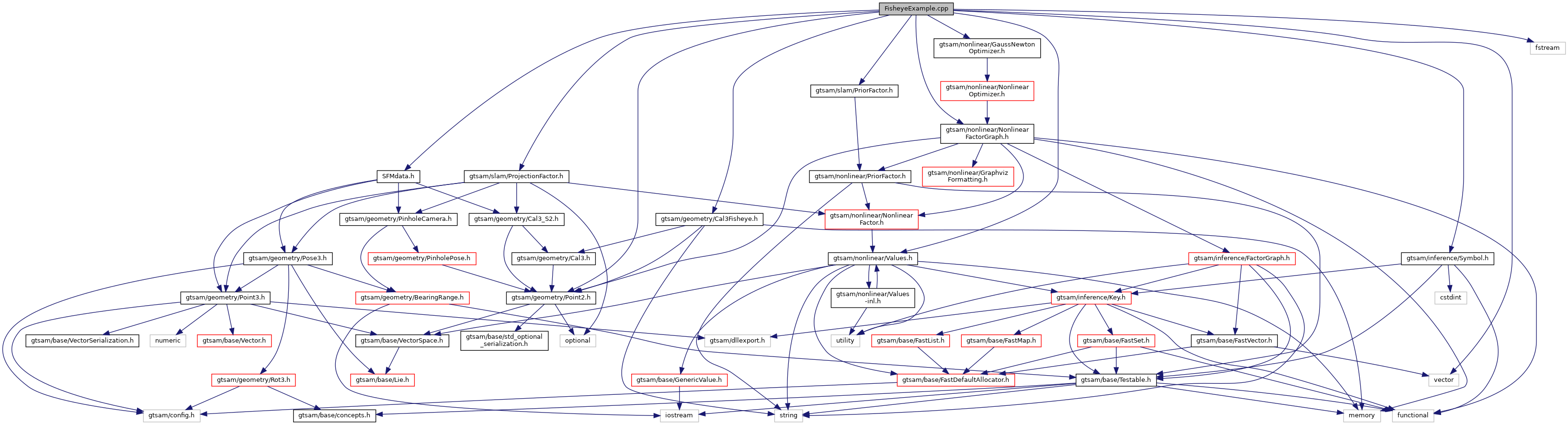
Include dependency graph for FisheyeExample.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
Detailed Description
A visualSLAM example for the structure-from-motion problem on a simulated dataset. This version uses a fisheye camera model and a GaussNewton solver to solve the graph in one batch.
Definition in file FisheyeExample.cpp.
Function Documentation
◆ main()
Definition at line 62 of file FisheyeExample.cpp.