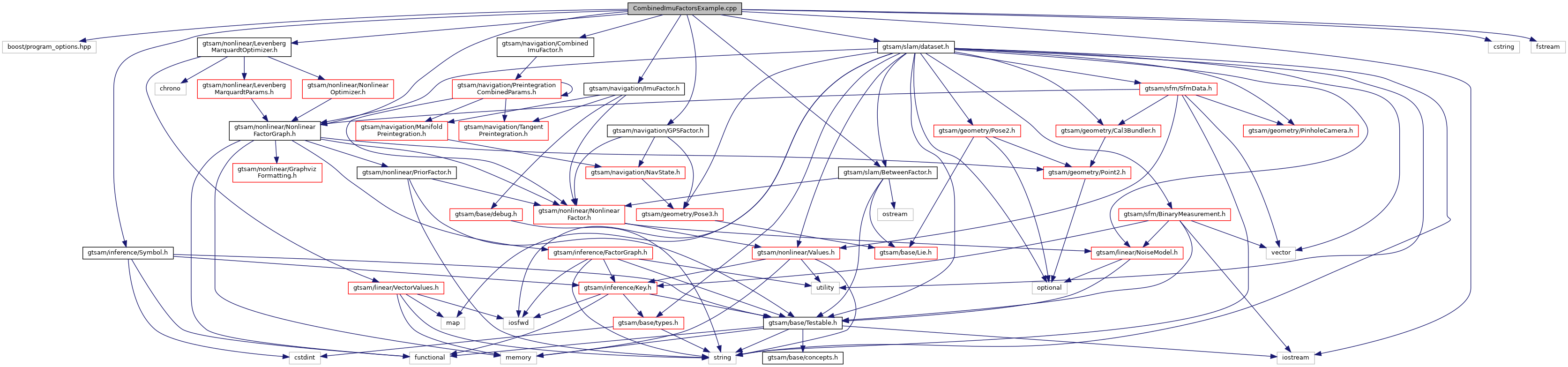
#include <boost/program_options.hpp>#include <gtsam/inference/Symbol.h>#include <gtsam/navigation/CombinedImuFactor.h>#include <gtsam/navigation/GPSFactor.h>#include <gtsam/navigation/ImuFactor.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/slam/dataset.h>#include <cstring>#include <fstream>#include <iostream>
Include dependency graph for CombinedImuFactorsExample.cpp:
Go to the source code of this file.
Functions | |
| std::shared_ptr< PreintegratedCombinedMeasurements::Params > | imuParams () |
| int | main (int argc, char *argv[]) |
| po::variables_map | parseOptions (int argc, char *argv[]) |
| Vector10 | readInitialState (ifstream &file) |
Function Documentation
◆ imuParams()
| std::shared_ptr<PreintegratedCombinedMeasurements::Params> imuParams | ( | ) |
Definition at line 98 of file CombinedImuFactorsExample.cpp.
◆ main()
Definition at line 131 of file CombinedImuFactorsExample.cpp.
◆ parseOptions()
| po::variables_map parseOptions | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 61 of file CombinedImuFactorsExample.cpp.
◆ readInitialState()
| Vector10 readInitialState | ( | ifstream & | file | ) |
Definition at line 83 of file CombinedImuFactorsExample.cpp.