Utils for adding diagnostics to a topic via node handle. More...
#include <node_handle_with_diagnostics.h>
Public Member Functions | |
| template<class Message > | |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::diagnostic_updater::Updater &updater, const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, const size_t queueSize, const bool latch=false) |
| Advertise publication of a message, automatically adding diagnostics to it. More... | |
| template<class Message > | |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::diagnostic_updater::Updater &updater, const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, ::ros::AdvertiseOptions &options) |
| Advertise publication of a message, automatically adding diagnostics to it. More... | |
| template<class Message > | |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &diagNamespace, const ::std::string &topic, const size_t queueSize, const bool latch=false) |
| Advertise publication of a message, automatically adding diagnostics to it. More... | |
| template<class Message > | |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &diagNamespace, ::ros::AdvertiseOptions &options) |
| Advertise publication of a message, automatically adding diagnostics to it. More... | |
| template<class Message > | |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &topic, const size_t queueSize, const bool latch=false) |
| Advertise publication of a message, automatically adding diagnostics to it. More... | |
| template<class Message > | |
| ::std::unique_ptr<::cras::DiagnosedPublisher< Message > > | advertiseDiagnosed (::diagnostic_updater::Updater &updater, ::ros::AdvertiseOptions &options) |
| Advertise publication of a message, automatically adding diagnostics to it. More... | |
| NodeHandleWithDiagnostics (const ::std::string &ns="", const ::ros::M_string &remappings={}) | |
| Create the node handle using the passed ROS node handle parameters. More... | |
| NodeHandleWithDiagnostics (const ::ros::NodeHandle &parent, const ::std::string &ns) | |
| Create the node handle using the passed ROS node handle parameters. More... | |
| NodeHandleWithDiagnostics (const ::ros::NodeHandle &parent, const ::std::string &ns, const ::ros::M_string &remappings) | |
| Create the node handle using the passed ROS node handle parameters. More... | |
| template<typename M , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(*cb)(M), ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename Message , typename = ::std::enable_if_t<::ros::message_traits::IsMessage<Message>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber< Message > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, const boost::function< void(const ::boost::shared_ptr< Message > &)> &cb, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename C , typename = ::std::enable_if_t<::cras::IsMessageParam<C>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< C > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< C >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, const boost::function< void(C)> &cb, ::ros::VoidConstPtr obj={}, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M), T *obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M) const, T *obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M), const ::boost::shared_ptr< T > &obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::cras::SimpleTopicStatusParam<::cras::BaseMessage< M >> &defaultDiagParams, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M) const, const ::boost::shared_ptr< T > &obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename Message , typename = ::std::enable_if_t<::ros::message_traits::IsMessage<Message>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber< Message > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::cras::SimpleTopicStatusParam< Message > &defaultDiagParams, const ::std::string &diagNamespace, ::ros::SubscribeOptions &options) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(*cb)(M), ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename Message , typename = ::std::enable_if_t<::ros::message_traits::IsMessage<Message>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber< Message > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, const boost::function< void(const ::boost::shared_ptr< Message > &)> &cb, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename C , typename = ::std::enable_if_t<::cras::IsMessageParam<C>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< C > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, const boost::function< void(C)> &cb, ::ros::VoidConstPtr obj={}, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M), T *obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M) const, T *obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M), const ::boost::shared_ptr< T > &obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &diagNamespace, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M) const, const ::boost::shared_ptr< T > &obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename Message , typename = ::std::enable_if_t<::ros::message_traits::IsMessage<Message>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber< Message > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &diagNamespace, ::ros::SubscribeOptions &options) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &topic, uint32_t queue_size, void(*cb)(M), ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename Message , typename = ::std::enable_if_t<::ros::message_traits::IsMessage<Message>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber< Message > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &topic, uint32_t queue_size, const boost::function< void(const ::boost::shared_ptr< Message > &)> &cb, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename C , typename = ::std::enable_if_t<::cras::IsMessageParam<C>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< C > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &topic, uint32_t queue_size, const boost::function< void(C)> &cb, ::ros::VoidConstPtr obj={}, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M), T *obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M) const, T *obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M), const ::boost::shared_ptr< T > &obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename M , class T , typename = ::std::enable_if_t<::cras::IsMessageParam<M>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber<::cras::BaseMessage< M > > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, const ::std::string &topic, uint32_t queue_size, void(T::*cb)(M) const, const ::boost::shared_ptr< T > &obj, ::ros::TransportHints hints={}) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
| template<typename Message , typename = ::std::enable_if_t<::ros::message_traits::IsMessage<Message>::value>> | |
| ::std::unique_ptr<::cras::DiagnosedSubscriber< Message > > | subscribeDiagnosed (::diagnostic_updater::Updater &updater, ::ros::SubscribeOptions &options) |
| Subscribe to the given topic, automatically updating the diagnostic task every time a message is received. More... | |
 Public Member Functions inherited from cras::NodeParamHelper Public Member Functions inherited from cras::NodeParamHelper | |
| NodeParamHelper (const ::std::string &ns="", const ::ros::M_string &remappings={}) | |
| NodeParamHelper (const ::ros::NodeHandle &parent, const ::std::string &ns) | |
| NodeParamHelper (const ::ros::NodeHandle &parent, const ::std::string &ns, const ::ros::M_string &remappings) | |
| Public Member Functions inherited from ros::NodeHandle | |
| Publisher | advertise (const std::string &topic, uint32_t queue_size, bool latch=false) |
| Publisher | advertise (const std::string &topic, uint32_t queue_size, const SubscriberStatusCallback &connect_cb, const SubscriberStatusCallback &disconnect_cb=SubscriberStatusCallback(), const VoidConstPtr &tracked_object=VoidConstPtr(), bool latch=false) |
| Publisher | advertise (AdvertiseOptions &ops) |
| ServiceServer | advertiseService (const std::string &service, bool(T::*srv_func)(MReq &, MRes &), T *obj) |
| ServiceServer | advertiseService (const std::string &service, bool(*srv_func)(MReq &, MRes &)) |
| ServiceServer | advertiseService (const std::string &service, bool(*srv_func)(ServiceEvent< MReq, MRes > &)) |
| ServiceServer | advertiseService (const std::string &service, bool(T::*srv_func)(ServiceEvent< MReq, MRes > &), T *obj) |
| ServiceServer | advertiseService (const std::string &service, const boost::function< bool(MReq &, MRes &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr()) |
| ServiceServer | advertiseService (const std::string &service, const boost::function< bool(S &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr()) |
| ServiceServer | advertiseService (const std::string &service, bool(T::*srv_func)(MReq &, MRes &), const boost::shared_ptr< T > &obj) |
| ServiceServer | advertiseService (AdvertiseServiceOptions &ops) |
| ServiceServer | advertiseService (const std::string &service, bool(T::*srv_func)(ServiceEvent< MReq, MRes > &), const boost::shared_ptr< T > &obj) |
| SteadyTimer | createSteadyTimer (SteadyTimerOptions &ops) const |
| SteadyTimer | createSteadyTimer (WallDuration period, void(T::*callback)(const SteadyTimerEvent &), T *obj, bool oneshot=false, bool autostart=true) const |
| SteadyTimer | createSteadyTimer (WallDuration period, void(T::*callback)(const SteadyTimerEvent &), const boost::shared_ptr< T > &obj, bool oneshot=false, bool autostart=true) const |
| SteadyTimer | createSteadyTimer (WallDuration period, const SteadyTimerCallback &callback, bool oneshot=false, bool autostart=true) const |
| Timer | createTimer (Rate r, Handler h, Obj o, bool oneshot=false, bool autostart=true) const |
| Timer | createTimer (Duration period, void(T::*callback)(const TimerEvent &) const, T *obj, bool oneshot=false, bool autostart=true) const |
| Timer | createTimer (Duration period, void(T::*callback)(const TimerEvent &), T *obj, bool oneshot=false, bool autostart=true) const |
| Timer | createTimer (Duration period, void(T::*callback)(const TimerEvent &), const boost::shared_ptr< T > &obj, bool oneshot=false, bool autostart=true) const |
| Timer | createTimer (Duration period, const TimerCallback &callback, bool oneshot=false, bool autostart=true) const |
| Timer | createTimer (TimerOptions &ops) const |
| WallTimer | createWallTimer (WallDuration period, void(T::*callback)(const WallTimerEvent &), T *obj, bool oneshot=false, bool autostart=true) const |
| WallTimer | createWallTimer (WallDuration period, void(T::*callback)(const WallTimerEvent &), const boost::shared_ptr< T > &obj, bool oneshot=false, bool autostart=true) const |
| WallTimer | createWallTimer (WallDuration period, const WallTimerCallback &callback, bool oneshot=false, bool autostart=true) const |
| WallTimer | createWallTimer (WallTimerOptions &ops) const |
| bool | deleteParam (const std::string &key) const |
| CallbackQueueInterface * | getCallbackQueue () const |
| const std::string & | getNamespace () const |
| bool | getParam (const std::string &key, float &f) const |
| bool | getParam (const std::string &key, int &i) const |
| bool | getParam (const std::string &key, bool &b) const |
| bool | getParam (const std::string &key, XmlRpc::XmlRpcValue &v) const |
| bool | getParam (const std::string &key, std::vector< std::string > &vec) const |
| bool | getParam (const std::string &key, std::vector< double > &vec) const |
| bool | getParam (const std::string &key, std::vector< float > &vec) const |
| bool | getParam (const std::string &key, std::vector< int > &vec) const |
| bool | getParam (const std::string &key, std::vector< bool > &vec) const |
| bool | getParam (const std::string &key, std::map< std::string, std::string > &map) const |
| bool | getParam (const std::string &key, std::map< std::string, double > &map) const |
| bool | getParam (const std::string &key, std::map< std::string, float > &map) const |
| bool | getParam (const std::string &key, std::map< std::string, int > &map) const |
| bool | getParam (const std::string &key, std::map< std::string, bool > &map) const |
| bool | getParam (const std::string &key, std::string &s) const |
| bool | getParam (const std::string &key, double &d) const |
| bool | getParamCached (const std::string &key, std::string &s) const |
| bool | getParamCached (const std::string &key, double &d) const |
| bool | getParamCached (const std::string &key, float &f) const |
| bool | getParamCached (const std::string &key, int &i) const |
| bool | getParamCached (const std::string &key, bool &b) const |
| bool | getParamCached (const std::string &key, XmlRpc::XmlRpcValue &v) const |
| bool | getParamCached (const std::string &key, std::map< std::string, float > &map) const |
| bool | getParamCached (const std::string &key, std::vector< std::string > &vec) const |
| bool | getParamCached (const std::string &key, std::vector< double > &vec) const |
| bool | getParamCached (const std::string &key, std::vector< float > &vec) const |
| bool | getParamCached (const std::string &key, std::vector< int > &vec) const |
| bool | getParamCached (const std::string &key, std::vector< bool > &vec) const |
| bool | getParamCached (const std::string &key, std::map< std::string, std::string > &map) const |
| bool | getParamCached (const std::string &key, std::map< std::string, double > &map) const |
| bool | getParamCached (const std::string &key, std::map< std::string, int > &map) const |
| bool | getParamCached (const std::string &key, std::map< std::string, bool > &map) const |
| bool | getParamNames (std::vector< std::string > &keys) const |
| const std::string & | getUnresolvedNamespace () const |
| bool | hasParam (const std::string &key) const |
| NodeHandle (const std::string &ns=std::string(), const M_string &remappings=M_string()) | |
| NodeHandle (const NodeHandle &rhs) | |
| NodeHandle (const NodeHandle &parent, const std::string &ns) | |
| NodeHandle (const NodeHandle &parent, const std::string &ns, const M_string &remappings) | |
| bool | ok () const |
| NodeHandle & | operator= (const NodeHandle &rhs) |
| T | param (const std::string ¶m_name, const T &default_val) const |
| bool | param (const std::string ¶m_name, T ¶m_val, const T &default_val) const |
| std::string | resolveName (const std::string &name, bool remap=true) const |
| bool | searchParam (const std::string &key, std::string &result) const |
| ServiceClient | serviceClient (ServiceClientOptions &ops) |
| ServiceClient | serviceClient (const std::string &service_name, bool persistent=false, const M_string &header_values=M_string()) |
| ServiceClient | serviceClient (const std::string &service_name, bool persistent=false, const M_string &header_values=M_string()) |
| void | setCallbackQueue (CallbackQueueInterface *queue) |
| void | setParam (const std::string &key, const std::map< std::string, bool > &map) const |
| void | setParam (const std::string &key, const std::map< std::string, int > &map) const |
| void | setParam (const std::string &key, const std::map< std::string, double > &map) const |
| void | setParam (const std::string &key, const XmlRpc::XmlRpcValue &v) const |
| void | setParam (const std::string &key, const std::map< std::string, float > &map) const |
| void | setParam (const std::string &key, const std::vector< float > &vec) const |
| void | setParam (const std::string &key, const std::vector< double > &vec) const |
| void | setParam (const std::string &key, const std::vector< bool > &vec) const |
| void | setParam (const std::string &key, const std::string &s) const |
| void | setParam (const std::string &key, const char *s) const |
| void | setParam (const std::string &key, bool b) const |
| void | setParam (const std::string &key, const std::vector< int > &vec) const |
| void | setParam (const std::string &key, const std::map< std::string, std::string > &map) const |
| void | setParam (const std::string &key, const std::vector< std::string > &vec) const |
| void | setParam (const std::string &key, int i) const |
| void | setParam (const std::string &key, double d) const |
| void | shutdown () |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (SubscribeOptions &ops) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) |
| Subscriber | subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) |
| ~NodeHandle () | |
| Public Member Functions inherited from cras::BoundParamHelper | |
| BoundParamHelper (const ::cras::LogHelperPtr &log, const ::cras::GetParamAdapterPtr ¶m) | |
| inline ::std::string | getNamespace () const |
| Return the namespace this helper operates in. More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| ResultType | getParam (const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| ResultType | getParam (const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::std::string | getParam (const ::std::string &name, const ::cras::optional< const char *> &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::std::string | getParam (const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions< std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::cras::GetParamResult<::std::string > | getParamVerbose (const ::std::string &name, const ::cras::optional< const char *> &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::cras::GetParamResult< std::string > | getParamVerbose (const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| bool | hasParam (const ::std::string &name, const bool searchNested=true) const |
| Whether a parameter with the given name exists. More... | |
| inline ::cras::BoundParamHelperPtr | paramsInNamespace (const ::std::string &ns) const |
| Return a parameter helper of a sub-namespace. More... | |
| ~BoundParamHelper () override=default | |
Protected Member Functions | |
| virtual ::cras::BoundParamHelperPtr | getDiagParams (const ::std::string &diagNs, const ::std::string &topic) const |
| Get the param helper from which parameters for the diagnostic task can be extracted. More... | |
| virtual ::std::string | prefixDiagNamespace (const ::std::string &ns) const |
| Optionally add a private node namespace to the given topic if this nodehandle is in the root node namespace. More... | |
| Protected Member Functions inherited from cras::ParamHelper | |
| ::cras::LogHelperPtr | getLogger () const |
| Return the log helper used for logging. More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| ResultType | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| ResultType | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::std::string | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< const char *> &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::std::string | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::cras::GetParamResult<::std::string > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< const char *> &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::cras::GetParamResult<::std::string > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| ParamHelper (const ::cras::LogHelperPtr &log) | |
| void | setLogger (const ::cras::LogHelperPtr &logger) |
| Set the log helper used for logging. More... | |
| virtual | ~ParamHelper ()=default |
| Protected Member Functions inherited from cras::HasLogger | |
| ::cras::LogHelperConstPtr | getCrasLogger () const |
This is the function picked up by CRAS_* logging macros. More... | |
| HasLogger (const ::cras::LogHelperPtr &log) | |
| Associate the logger with this interface. More... | |
| void | setCrasLogger (const ::cras::LogHelperPtr &log) |
| Set the logger to be used for logging. More... | |
Protected Attributes | |
| ::ros::NodeHandle | parentNh {} |
| The parent node handle of this one. More... | |
| Protected Attributes inherited from cras::BoundParamHelper | |
| ::cras::GetParamAdapterPtr | param |
| The bound parameter adapter. More... | |
| Protected Attributes inherited from cras::HasLogger | |
| ::cras::LogHelperPtr | log |
| Log helper. More... | |
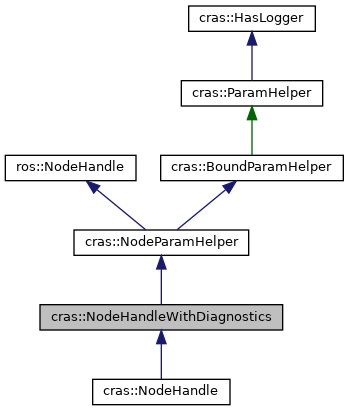
Detailed Description
Utils for adding diagnostics to a topic via node handle.
The publisher and subscriber diagnostic tasks can be configured from ROS parameters. The following parameters are read:
rate/desired(double, Hz, no default): If set, this value will be used as the default of min/max rates.rate/min(double, Hz, default 0.0 or desired): Minimum acceptable rate.rate/max(double, Hz, default +inf or desired): Maximum acceptable rate.rate/tolerance(double, default 0.1): Tolerance of the min/max rate (0.0 means that the min/max rate limits are strict).rate/window_size(uint, default 5): Over how many diagnostics updates should the rate be computed.delay/min(double, s, default -1.0): Minimum acceptable delay (only computed for messages with a header).delay/max(double, s, default 5.0): Maximum acceptable delay (only computed for messages with a header).
The parameter namespace from which they are configured is determined as follows:
- If no explicit namespace is specified, the topic name is used.
- Name remapping is done only "until" the topic name level. I.e. node name or parent namespaces are affected by remappings, but the topic name is not. If the topic name is absolute, it is taken as is without any remappings.
- Explicit namespaces are remapped as normal ROS parameters.
- If the namespace starts with ~ or is not specified (topic name is used), the private node namespace (node name) is prepended.
- If this node handle already represents a private node handle, no additional namespace is prepended.
Here are a few examples:
// node name is "diag_utils"
cras::NodeHandleWithDiagnostics nh;
cras::NodeHandleWithDiagnostics pnh("~");
cras::NodeHandleWithDiagnostics tnh("test");
cras::NodeHandleWithDiagnostics rnh("", {{"/topic", "/topic2"}}); // remap /topic->/topic2 nh.advertiseDiagnosed(updater, "topic", 10); // param namespace is /diag_utils/topic
nh.advertiseDiagnosed(updater, "/topic", 10); // param namespace is /topic
nh.advertiseDiagnosed(updater, "test", "topic", 10); // param namespace is /test
nh.advertiseDiagnosed(updater, "~test", "topic", 10); // param namespace is /diag_utils/test
pnh.advertiseDiagnosed(updater, "topic", 10); // param namespace is /diag_utils/topic
pnh.advertiseDiagnosed(updater, "/topic", 10); // param namespace is /topic
pnh.advertiseDiagnosed(updater, "test", "topic", 10); // param namespace is /diag_utils/test
pnh.advertiseDiagnosed(updater, "~test", "topic", 10); // param namespace is /diag_utils/test
tnh.advertiseDiagnosed(updater, "topic", 10); // param namespace is /test/topic
tnh.advertiseDiagnosed(updater, "/topic", 10); // param namespace is /topic
tnh.advertiseDiagnosed(updater, "test", "topic", 10); // param namespace is /test/test
tnh.advertiseDiagnosed(updater, "~test", "topic", 10); // param namespace is /test/test
rnh.advertiseDiagnosed(updater, "topic", 10); // subscribes /topic2, param namespace is /diag_utils/topic
rnh.advertiseDiagnosed(updater, "/topic", 10); // subscribes /topic2, param namespace is /topic
Definition at line 88 of file node_handle_with_diagnostics.h.
Constructor & Destructor Documentation
◆ NodeHandleWithDiagnostics() [1/3]
|
explicit |
Create the node handle using the passed ROS node handle parameters.
- Parameters
-
[in] ns Namespace of the handle. [in] remappings Remappings.
◆ NodeHandleWithDiagnostics() [2/3]
| cras::NodeHandleWithDiagnostics::NodeHandleWithDiagnostics | ( | const ::ros::NodeHandle & | parent, |
| const ::std::string & | ns | ||
| ) |
Create the node handle using the passed ROS node handle parameters.
- Parameters
-
[in] parent Parent node handle. [in] ns Namespace of the handle.
◆ NodeHandleWithDiagnostics() [3/3]
| cras::NodeHandleWithDiagnostics::NodeHandleWithDiagnostics | ( | const ::ros::NodeHandle & | parent, |
| const ::std::string & | ns, | ||
| const ::ros::M_string & | remappings | ||
| ) |
Create the node handle using the passed ROS node handle parameters.
- Parameters
-
[in] parent Parent node handle. [in] ns Namespace of the handle. [in] remappings Remappings.
Member Function Documentation
◆ advertiseDiagnosed() [1/6]
|
inline |
Advertise publication of a message, automatically adding diagnostics to it.
- Template Parameters
-
Message Type of the message to be published.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] defaultDiagParams Default parameters of the diagnostic task. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to advertise and diagnose. [in] queueSize Size of the publishing queue. [in] latch Whether to latch the publication.
- Returns
- A publisher object whose
publish()method has to be used to correctly automate the diagnostic task updating.
Definition at line 150 of file node_handle_with_diagnostics.h.
◆ advertiseDiagnosed() [2/6]
|
inline |
Advertise publication of a message, automatically adding diagnostics to it.
- Template Parameters
-
Message Type of the message to be published.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] defaultDiagParams Default parameters of the diagnostic task. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in,out] options Advertise options that configure the publisher.
- Returns
- A publisher object whose
publish()method has to be used to correctly automate the diagnostic task updating.
Definition at line 173 of file node_handle_with_diagnostics.h.
◆ advertiseDiagnosed() [3/6]
|
inline |
Advertise publication of a message, automatically adding diagnostics to it.
- Template Parameters
-
Message Type of the message to be published.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to advertise and diagnose. [in] queueSize Size of the publishing queue. [in] latch Whether to latch the publication.
- Returns
- A publisher object whose
publish()method has to be used to correctly automate the diagnostic task updating.
Definition at line 198 of file node_handle_with_diagnostics.h.
◆ advertiseDiagnosed() [4/6]
|
inline |
Advertise publication of a message, automatically adding diagnostics to it.
- Template Parameters
-
Message Type of the message to be published.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in,out] options Advertise options that configure the publisher.
- Returns
- A publisher object whose
publish()method has to be used to correctly automate the diagnostic task updating.
Definition at line 216 of file node_handle_with_diagnostics.h.
◆ advertiseDiagnosed() [5/6]
|
inline |
Advertise publication of a message, automatically adding diagnostics to it.
- Template Parameters
-
Message Type of the message to be published.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] topic The topic to advertise and diagnose. [in] queueSize Size of the publishing queue. [in] latch Whether to latch the publication.
- Returns
- A publisher object whose
publish()method has to be used to correctly automate the diagnostic task updating.
- Note
- The diagnostic task will search its parameters in parameter namespace
~/topic.
Definition at line 236 of file node_handle_with_diagnostics.h.
◆ advertiseDiagnosed() [6/6]
|
inline |
Advertise publication of a message, automatically adding diagnostics to it.
- Template Parameters
-
Message Type of the message to be published.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in,out] options Advertise options that configure the publisher.
- Returns
- A publisher object whose
publish()method has to be used to correctly automate the diagnostic task updating.
- Note
- The diagnostic task will search its parameters in parameter namespace
~/topic.
Definition at line 253 of file node_handle_with_diagnostics.h.
◆ getDiagParams()
|
protected |
Get the param helper from which parameters for the diagnostic task can be extracted.
- Parameters
-
[in] diagNs Namespace of the diagnostic task. Pass empty string if you want to search a parameter namespace based on the topic name. [in] topic Name of the diagnosed topic which will be used as a default parameter namespace.
- Returns
- The param helper.
◆ prefixDiagNamespace()
|
protected |
Optionally add a private node namespace to the given topic if this nodehandle is in the root node namespace.
- Parameters
-
[in] ns The namespace to prefix.
- Returns
- The prefix namespace.
◆ subscribeDiagnosed() [1/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] defaultDiagParams Default parameters of the diagnostic task. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 276 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [2/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
Message Type of the message to subscribe to.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] defaultDiagParams Default parameters of the diagnostic task. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 301 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [3/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
C Signature of the callback.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] defaultDiagParams Default parameters of the diagnostic task. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj Tracked object. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 327 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [4/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] defaultDiagParams Default parameters of the diagnostic task. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 355 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [5/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] defaultDiagParams Default parameters of the diagnostic task. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 382 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [6/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] defaultDiagParams Default parameters of the diagnostic task. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 409 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [7/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] defaultDiagParams Default parameters of the diagnostic task. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 437 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [8/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
Message Type of the message to subscribe to.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] defaultDiagParams Default parameters of the diagnostic task. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in,out] options Subscription options.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 460 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [9/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 483 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [10/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
Message Type of the message to subscribe to.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 503 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [11/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
C Signature of the callback.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj Tracked object. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 525 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [12/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 548 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [13/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 570 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [14/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 592 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [15/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 615 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [16/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
Message Type of the message to subscribe to.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] diagNamespace Parameter namespace in which the parameters for the diagnostic task will be searched. [in,out] options Subscription options.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 633 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [17/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
- Note
- The diagnostic task will search its parameters in parameter namespace
~/topic.
Definition at line 653 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [18/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
Message Type of the message to subscribe to.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
- Note
- The diagnostic task will search its parameters in parameter namespace
~/topic.
Definition at line 672 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [19/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
C Signature of the callback.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj Tracked object. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
Definition at line 692 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [20/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
- Note
- The diagnostic task will search its parameters in parameter namespace
~/topic.
Definition at line 714 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [21/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
- Note
- The diagnostic task will search its parameters in parameter namespace
~/topic.
Definition at line 735 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [22/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
- Note
- The diagnostic task will search its parameters in parameter namespace
~/topic.
Definition at line 756 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [23/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
M Signature of the callback. T Type of the object on which the callback will be called.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in] topic The topic to subscribe to. [in] queue_size Size of the subscription queue. [in] cb The callback to call when a message is received. [in] obj The object to call the callback on. [in] hints Connection hints.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
- Note
- The diagnostic task will search its parameters in parameter namespace
~/topic.
Definition at line 778 of file node_handle_with_diagnostics.h.
◆ subscribeDiagnosed() [24/24]
|
inline |
Subscribe to the given topic, automatically updating the diagnostic task every time a message is received.
- Template Parameters
-
Message Type of the message to subscribe to.
- Parameters
-
[in] updater The diagnostic updater to add the diagnostic task to. [in,out] options Subscription options.
- Returns
- The subscriber object. Keep it alive whole time the subscription should be active!
- Note
- The diagnostic task will search its parameters in parameter namespace
~/topic.
Definition at line 795 of file node_handle_with_diagnostics.h.
Member Data Documentation
◆ parentNh
|
protected |
The parent node handle of this one.
Definition at line 802 of file node_handle_with_diagnostics.h.
The documentation for this class was generated from the following file: