Generic interface for optimization problem definitions. More...
#include <optimization_problem_interface.h>
Public Types | |
| using | Ptr = std::shared_ptr< OptimizationProblemInterface > |
| using | UPtr = std::unique_ptr< OptimizationProblemInterface > |
Public Member Functions | |
| virtual bool | checkIfAllUnfixedParam (std::function< bool(double, int)> fun) |
| Check if a function taking the parameter value and unfixed-idx is true for all unfixed parameter values. More... | |
| virtual void | clear () |
| virtual void | computeCombinedSparseJacobian (Eigen::SparseMatrix< double > &jacobian, bool objective_lsq, bool equality, bool inequality, bool finite_combined_bounds, bool active_ineq=false, double weight_eq=1.0, double weight_ineq=1.0, double weight_bounds=1.0, const Eigen::VectorXd *values=nullptr, const Eigen::VectorXi *col_nnz=nullptr) |
| virtual int | computeCombinedSparseJacobiansNNZ (bool objective_lsq=true, bool equality=true, bool inequality=true) |
| virtual void | computeCombinedSparseJacobiansStructure (Eigen::Ref< Eigen::VectorXi > i_row, Eigen::Ref< Eigen::VectorXi > j_col, bool objective_lsq=true, bool equality=true, bool inequality=true) |
| virtual void | computeCombinedSparseJacobiansValues (Eigen::Ref< Eigen::VectorXd > values, bool objective_lsq=true, bool equality=true, bool inequality=true, const double *multipliers_obj=nullptr, const double *multipliers_eq=nullptr, const double *multipliers_ineq=nullptr) |
| virtual void | computeDenseHessianEqualities (Eigen::Ref< Eigen::MatrixXd > hessian, const double *multipliers=nullptr) |
| virtual void | computeDenseHessianInequalities (Eigen::Ref< Eigen::MatrixXd > hessian, const double *multipliers=nullptr) |
| virtual void | computeDenseHessianObjective (const Eigen::Ref< const Eigen::MatrixXd > &jacobian, Eigen::Ref< Eigen::MatrixXd > hessian, const double *multipliers=nullptr, bool jacob_scaled=true) |
| Compute the objective Hessian Hf(x) for the current parameter set. More... | |
| virtual void | computeDenseHessianObjective (Eigen::Ref< Eigen::MatrixXd > hessian, double multiplier=1.0) |
| virtual void | computeDenseHessians (Eigen::Ref< Eigen::MatrixXd > hessian_obj, Eigen::Ref< Eigen::MatrixXd > hessian_eq, Eigen::Ref< Eigen::MatrixXd > hessian_ineq, double multiplier_obj=1.0, const double *multipliers_eq=nullptr, const double *multipliers_ineq=nullptr) |
| virtual void | computeDenseJacobianActiveInequalities (Eigen::Ref< Eigen::MatrixXd > jacobian, double weight=1.0) |
| Compute the Jacobian Jc(x) with non-zeros for active constraints c(x)>= 0 and zeros for inactive ones. More... | |
| virtual void | computeDenseJacobianEqualities (Eigen::Ref< Eigen::MatrixXd > jacobian, const double *multipliers=nullptr) |
| Compute the equality constraint Jacobian Jceq(x) for the current parameter set. More... | |
| virtual void | computeDenseJacobianFiniteCombinedBounds (Eigen::Ref< Eigen::MatrixXd > jacobian, double weight=1.0) |
| Compute the Jacobian for finite combined bounds. More... | |
| virtual void | computeDenseJacobianFiniteCombinedBoundsIdentity (Eigen::Ref< Eigen::MatrixXd > jacobian) |
| Compute the Jacobian for finite combined bounds. More... | |
| virtual void | computeDenseJacobianInequalities (Eigen::Ref< Eigen::MatrixXd > jacobian, const double *multipliers=nullptr) |
| Compute the inequality constraint Jacobian Jc(x) for the current parameter set. More... | |
| virtual void | computeDenseJacobianLsqObjective (Eigen::Ref< Eigen::MatrixXd > jacobian, const double *multipliers=nullptr) |
| Compute the objective Jacobian Jf(x) for the current parameter set. More... | |
| virtual void | computeDenseJacobians (Eigen::Ref< Eigen::VectorXd > gradient_non_lsq_obj, Eigen::Ref< Eigen::MatrixXd > jacobian_lsq_obj, Eigen::Ref< Eigen::MatrixXd > jacobian_eq, Eigen::Ref< Eigen::MatrixXd > jacobian_ineq, const double *multipliers_lsq_obj=nullptr, const double *multipliers_eq=nullptr, const double *multipliers_ineq=nullptr, bool active_ineq=false, double active_ineq_weight=1.0) |
| Compute the objective and constraint Jacobians at once. More... | |
| virtual void | computeDistanceFiniteCombinedBounds (Eigen::Ref< Eigen::VectorXd > values) |
| Compute the distance to finite bound values (combined lower and upper) More... | |
| virtual void | computeGradientNonLsqObjective (Eigen::Ref< Eigen::VectorXd > gradient) |
| virtual void | computeGradientObjective (Eigen::Ref< Eigen::VectorXd > gradient) |
| virtual void | computeGradientObjectiveAndCombinedSparseJacobiansValues (Eigen::Ref< Eigen::VectorXd > gradient, Eigen::Ref< Eigen::VectorXd > jac_values, bool equality=true, bool inequality=true, const double *multipliers_eq=nullptr, const double *multipliers_ineq=nullptr) |
| virtual void | computeLowerAndUpperBoundDiff (Eigen::Ref< Eigen::VectorXd > lb_minus_x, Eigen::Ref< Eigen::VectorXd > ub_minus_x) |
| Compute the distance between parameters and bounds. More... | |
| virtual void | computeSparseHessianEqualities (Eigen::SparseMatrix< double > &hessian, const double *multipliers=nullptr) |
| virtual int | computeSparseHessianEqualitiesNNZ (bool lower_part_only=false) |
| virtual void | computeSparseHessianEqualitiesStructure (Eigen::Ref< Eigen::VectorXi > i_row, Eigen::Ref< Eigen::VectorXi > j_col, bool lower_part_only=false) |
| virtual void | computeSparseHessianEqualitiesValues (Eigen::Ref< Eigen::VectorXd > values, const double *multipliers=nullptr, bool lower_part_only=false) |
| virtual void | computeSparseHessianInequalities (Eigen::SparseMatrix< double > &hessian, const double *multipliers=nullptr) |
| virtual int | computeSparseHessianInequalitiesNNZ (bool lower_part_only=false) |
| virtual void | computeSparseHessianInequalitiesStructure (Eigen::Ref< Eigen::VectorXi > i_row, Eigen::Ref< Eigen::VectorXi > j_col, bool lower_part_only=false) |
| virtual void | computeSparseHessianInequalitiesValues (Eigen::Ref< Eigen::VectorXd > values, const double *multipliers=nullptr, bool lower_part_only=false) |
| virtual void | computeSparseHessianLagrangian (Eigen::SparseMatrix< double, Eigen::ColMajor, long long > &H, const double *multipliers_eq, const double *multipliers_ineq, const Eigen::VectorXi *col_nnz=nullptr, bool upper_part_only=false) |
| Compute the hessian of the lagrangian L(x) = f(x) + lambda1 * c(x) + lambda2 * ceq(x) More... | |
| virtual void | computeSparseHessianLagrangianNNZperCol (Eigen::Ref< Eigen::VectorXi > col_nnz, bool upper_part_only) |
| virtual void | computeSparseHessianObjective (Eigen::SparseMatrix< double > &hessian, double multiplier=1.0) |
| virtual void | computeSparseHessianObjectiveLL (Eigen::SparseMatrix< double, Eigen::ColMajor, long long > &H, const Eigen::VectorXi *col_nnz=nullptr, bool upper_part_only=false) |
| virtual int | computeSparseHessianObjectiveNNZ (bool lower_part_only=false) |
| virtual void | computeSparseHessianObjectiveNNZperCol (Eigen::Ref< Eigen::VectorXi > col_nnz, bool upper_part_only=false) |
| virtual void | computeSparseHessianObjectiveStructure (Eigen::Ref< Eigen::VectorXi > i_row, Eigen::Ref< Eigen::VectorXi > j_col, bool lower_part_only=false) |
| virtual void | computeSparseHessianObjectiveValues (Eigen::Ref< Eigen::VectorXd > values, double multiplier=1.0, bool lower_part_only=false) |
| virtual void | computeSparseHessians (Eigen::SparseMatrix< double > &hessian_obj, Eigen::SparseMatrix< double > &hessian_eq, Eigen::SparseMatrix< double > &hessian_ineq, double multiplier_obj=1.0, const double *multipliers_eq=nullptr, const double *multipliers_ineq=nullptr) |
| virtual void | computeSparseHessiansNNZ (int &nnz_obj, int &nnz_eq, int &nnz_ineq, bool lower_part_only=false) |
| virtual void | computeSparseHessiansStructure (Eigen::Ref< Eigen::VectorXi > i_row_obj, Eigen::Ref< Eigen::VectorXi > j_col_obj, Eigen::Ref< Eigen::VectorXi > i_row_eq, Eigen::Ref< Eigen::VectorXi > j_col_eq, Eigen::Ref< Eigen::VectorXi > i_row_ineq, Eigen::Ref< Eigen::VectorXi > j_col_ineq, bool lower_part_only=false) |
| virtual void | computeSparseHessiansValues (Eigen::Ref< Eigen::VectorXd > values_obj, Eigen::Ref< Eigen::VectorXd > values_eq, Eigen::Ref< Eigen::VectorXd > values_ineq, double multiplier_obj=1.0, const double *multipliers_eq=nullptr, const double *multipliers_ineq=nullptr, bool lower_part_only=false) |
| virtual void | computeSparseJacobianActiveInequalities (Eigen::SparseMatrix< double > &jacobian, double weight=1.0) |
| virtual void | computeSparseJacobianActiveInequalitiesValues (Eigen::Ref< Eigen::VectorXd > values, double weight=1.0) |
| virtual void | computeSparseJacobianEqualities (Eigen::SparseMatrix< double > &jacobian, const double *multipliers=nullptr) |
| virtual int | computeSparseJacobianEqualitiesNNZ () |
| virtual void | computeSparseJacobianEqualitiesStructure (Eigen::Ref< Eigen::VectorXi > i_row, Eigen::Ref< Eigen::VectorXi > j_col) |
| virtual void | computeSparseJacobianEqualitiesValues (Eigen::Ref< Eigen::VectorXd > values, const double *multipliers=nullptr) |
| virtual void | computeSparseJacobianFiniteCombinedBounds (Eigen::SparseMatrix< double > &jacobian, double weight=1.0) |
| virtual int | computeSparseJacobianFiniteCombinedBoundsNNZ () |
| virtual void | computeSparseJacobianFiniteCombinedBoundsStructure (Eigen::Ref< Eigen::VectorXi > i_row, Eigen::Ref< Eigen::VectorXi > j_col) |
| virtual void | computeSparseJacobianFiniteCombinedBoundsValues (Eigen::Ref< Eigen::VectorXd > values, double weight=1.0) |
| virtual void | computeSparseJacobianInequalities (Eigen::SparseMatrix< double > &jacobian, const double *multipliers=nullptr) |
| virtual int | computeSparseJacobianInequalitiesNNZ () |
| virtual void | computeSparseJacobianInequalitiesStructure (Eigen::Ref< Eigen::VectorXi > i_row, Eigen::Ref< Eigen::VectorXi > j_col) |
| virtual void | computeSparseJacobianInequalitiesValues (Eigen::Ref< Eigen::VectorXd > values, const double *multipliers=nullptr) |
| virtual void | computeSparseJacobianLsqObjective (Eigen::SparseMatrix< double > &jacobian, const double *multipliers=nullptr) |
| virtual int | computeSparseJacobianLsqObjectiveNNZ () |
| virtual void | computeSparseJacobianLsqObjectiveStructure (Eigen::Ref< Eigen::VectorXi > i_row, Eigen::Ref< Eigen::VectorXi > j_col) |
| virtual void | computeSparseJacobianLsqObjectiveValues (Eigen::Ref< Eigen::VectorXd > values, const double *multipliers=nullptr) |
| virtual void | computeSparseJacobians (Eigen::SparseMatrix< double > &jacobian_lsq_obj, Eigen::SparseMatrix< double > &jacobian_eq, Eigen::SparseMatrix< double > &jacobian_ineq, const double *multipliers_lsq_obj=nullptr, const double *multipliers_eq=nullptr, const double *multipliers_ineq=nullptr, bool active_ineq=false, double active_ineq_weight=1.0) |
| virtual void | computeSparseJacobiansNNZ (int &nnz_lsq_obj, int &nnz_eq, int &nnz_ineq) |
| virtual void | computeSparseJacobiansStructure (Eigen::Ref< Eigen::VectorXi > i_row_obj, Eigen::Ref< Eigen::VectorXi > j_col_obj, Eigen::Ref< Eigen::VectorXi > i_row_eq, Eigen::Ref< Eigen::VectorXi > j_col_eq, Eigen::Ref< Eigen::VectorXi > i_row_ineq, Eigen::Ref< Eigen::VectorXi > j_col_ineq) |
| virtual void | computeSparseJacobiansValues (Eigen::Ref< Eigen::VectorXd > values_obj, Eigen::Ref< Eigen::VectorXd > values_eq, Eigen::Ref< Eigen::VectorXd > values_ineq, const double *multipliers_obj=nullptr, const double *multipliers_eq=nullptr, const double *multipliers_ineq=nullptr, bool active_ineq=false, double active_ineq_weight=1.0) |
| virtual void | computeSparseJacobianTwoSideBoundedLinearFormAndHessianObjective (Eigen::SparseMatrix< double, Eigen::ColMajor, long long > &H, Eigen::SparseMatrix< double, Eigen::ColMajor, long long > &A, bool include_finite_bounds, const Eigen::VectorXi *col_nnz_H, const Eigen::VectorXi *col_nnz_A, bool upper_part_only_H) |
| virtual void | computeValuesActiveInequality (Eigen::Ref< Eigen::VectorXd > values, double weight=1.0) |
| Compute the values of the active inequality constraints (elementwise max(0, c(x))) More... | |
| virtual void | getParametersAndBoundsFinite (Eigen::Ref< Eigen::VectorXd > lb_finite_bounds, Eigen::Ref< Eigen::VectorXd > ub_finite_bounds, Eigen::Ref< Eigen::VectorXd > x_finite_bounds) |
| Return bound and parameter vectors only for finite boudns. More... | |
| virtual | ~OptimizationProblemInterface () |
Specify the dimension of the optimization problem | |
| virtual int | getNonLsqObjectiveDimension ()=0 |
| Get dimension of the objective (should be zero or one) More... | |
| virtual int | getLsqObjectiveDimension ()=0 |
| Total dimension of least-squares objective function terms. More... | |
| virtual int | getObjectiveDimension ()=0 |
| Get dimension of the objective (should be zero or one, includes Lsq objectives if present) More... | |
| virtual int | getEqualityDimension ()=0 |
| Total dimension of equality constraints. More... | |
| virtual int | getInequalityDimension ()=0 |
| Total dimension of general inequality constraints. More... | |
| virtual int | getParameterDimension ()=0 |
| Effictive dimension of the optimization parameter set (changeable, non-fixed part) More... | |
Generic interface to interact with the underlying parameter/variables representation | |
| virtual void | applyIncrement (const Eigen::Ref< const Eigen::VectorXd > &increment) |
| Apply increment to the current parameter set. More... | |
| virtual void | applyIncrement (int idx, double increment) |
| Apply increment to the current parameter set (single element overload) More... | |
| virtual double | getParameterValue (int idx)=0 |
| Return specific value of the parameter vector. More... | |
| virtual void | setParameterValue (int idx, double x)=0 |
| Set specific value of the parameter vector. More... | |
| virtual void | getParameterVector (Eigen::Ref< Eigen::VectorXd > x) |
| Return deep copy of the complete parameter vector. More... | |
| virtual void | setParameterVector (const Eigen::Ref< const Eigen::VectorXd > &x) |
| Set complete parameter vector. More... | |
| virtual void | backupParameters ()=0 |
| Restore parameter set from the last backup and keep backup if desired. More... | |
| virtual void | restoreBackupParameters (bool keep_backup)=0 |
| Discard last backup (or all) More... | |
| virtual void | discardBackupParameters (bool all=false)=0 |
Specify properties of the optimization problem | |
| virtual bool | isLeastSquaresProblem () const =0 |
| Check if the underlying problem is defined in the least squares form. More... | |
Access bounds | |
| virtual double | getLowerBound (int idx)=0 |
| Return specific lower bound value of a parameter. More... | |
| virtual double | getUpperBound (int idx)=0 |
| Return specific upper bound of a parameter. More... | |
| virtual void | setLowerBound (int idx, double lb)=0 |
| Set specific lower bound of a parameter. More... | |
| virtual void | setUpperBound (int idx, double ub)=0 |
| Set specific upper bound of a parameter. More... | |
| virtual void | setBounds (const Eigen::Ref< const Eigen::VectorXd > &lb, const Eigen::Ref< const Eigen::VectorXd > &ub) |
| Set lower and upper bound vector. More... | |
| virtual void | getBounds (Eigen::Ref< Eigen::VectorXd > lb, Eigen::Ref< Eigen::VectorXd > ub) |
| Get lower and upper bound vector. More... | |
Specify main equations of the optimization problem | |
| virtual void | computeValuesLsqObjective (Eigen::Ref< Eigen::VectorXd > values)=0 |
| Compute the objective function values f(x) for the current parameter set. More... | |
| virtual double | computeValueNonLsqObjective ()=0 |
| virtual double | computeValueObjective () |
| virtual void | computeValuesEquality (Eigen::Ref< Eigen::VectorXd > values)=0 |
| Compute the equality constraint values ceq(x) for the current parameter set. More... | |
| virtual void | computeValuesInequality (Eigen::Ref< Eigen::VectorXd > values)=0 |
| Compute the inequality constraint values c(x) for the current parameter set. More... | |
| virtual void | computeValues (double &non_lsq_obj_value, Eigen::Ref< Eigen::VectorXd > lsq_obj_values, Eigen::Ref< Eigen::VectorXd > eq_values, Eigen::Ref< Eigen::VectorXd > ineq_values) |
Methods for dealing with bounds | |
| virtual int | finiteCombinedBoundsDimension () |
| Dimension of the set of finite bounds (combined such that each ub and lb component define a single dimension) More... | |
| virtual int | finiteBoundsDimension () |
| Dimension of the set of finite bounds (individual bounds ub and lb) More... | |
Methods specialized for QP forms | |
| virtual void | computeSparseJacobianTwoSideBoundedLinearForm (Eigen::SparseMatrix< double, Eigen::ColMajor, long long > &A, bool include_finite_bounds, const Eigen::VectorXi *col_nnz=nullptr) |
| Compute the jacobian A for the linear form lbA <= A x <= lbB. More... | |
| virtual void | computeSparseJacobianTwoSideBoundedLinearFormNNZPerColumn (Eigen::Ref< Eigen::VectorXi > col_nnz, bool include_finite_bounds) |
| virtual int | computeSparseJacobianTwoSideBoundedLinearFormNNZ (bool include_finite_bounds) |
| virtual void | computeSparseJacobianTwoSideBoundedLinearFormStructure (Eigen::Ref< Eigen::VectorXi > i_row, Eigen::Ref< Eigen::VectorXi > j_col, bool include_finite_bounds) |
| virtual void | computeSparseJacobianTwoSideBoundedLinearFormValues (Eigen::Ref< Eigen::VectorXd > values, bool include_finite_bounds) |
| virtual void | computeSparseJacobianTwoSideBoundedLinearFormAndHessianLagrangian (Eigen::SparseMatrix< double, Eigen::ColMajor, long long > &H, const double *multipliers_eq, const double *multipliers_ineq, Eigen::SparseMatrix< double, Eigen::ColMajor, long long > &A, bool include_finite_bounds, const Eigen::VectorXi *col_nnz_H=nullptr, const Eigen::VectorXi *col_nnz_A=nullptr, bool upper_part_only_H=false) |
| Compute the Jacobian and Hessian of the lagrangian. More... | |
| virtual void | computeBoundsForTwoSideBoundedLinearForm (Eigen::Ref< Eigen::VectorXd > lbA, Eigen::Ref< Eigen::VectorXd > ubA, bool include_finite_bounds) |
| Compute lower and upper bounds lbA and ubA for the linear form lbA <= A x <= ubA. More... | |
Protected Attributes | |
| bool | _warn_if_not_specialized = true |
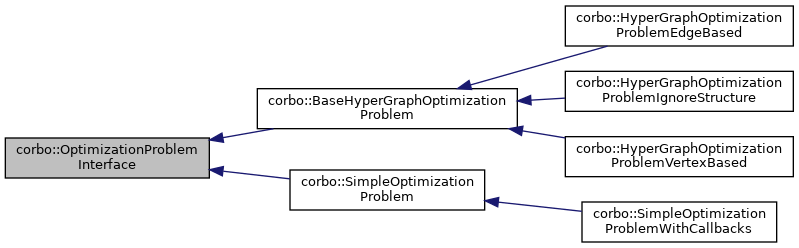
Detailed Description
Generic interface for optimization problem definitions.
This class can be used to generically define optimization problems with objectives, equality constraints, inequality constraints, box constraints and their current parameter state.
![\[ \min f(x), \ f : \mathbb{R}^n \to \mathbb{R}^m \\ \text{subject to:} \\ ceq(x) = 0 \\ c(x) < 0 \\ lb < x < ub \]](form_281.png)
First order and second order derivatives can be provided but their actual usage depends on the SolverInterface back-end which solves the optimization problem. Some solvers may require the implementation of those methods.
Solvers determine a parameter increment in each of their iterations so this class provides a method applyIncrement() to modify the underlying optimization parameter set. In order to convinentially store and restore the current parameter set from the solver backend side, appropriate backup methods must be provided by subclasses.
- See also
- SolverInterface
Definition at line 70 of file optimization_problem_interface.h.
Member Typedef Documentation
◆ Ptr
| using corbo::OptimizationProblemInterface::Ptr = std::shared_ptr<OptimizationProblemInterface> |
Definition at line 73 of file optimization_problem_interface.h.
◆ UPtr
| using corbo::OptimizationProblemInterface::UPtr = std::unique_ptr<OptimizationProblemInterface> |
Definition at line 74 of file optimization_problem_interface.h.
Constructor & Destructor Documentation
◆ ~OptimizationProblemInterface()
|
inlinevirtual |
Definition at line 76 of file optimization_problem_interface.h.
Member Function Documentation
◆ applyIncrement() [1/2]
|
virtual |
Apply increment to the current parameter set.
Usually solvers determine a new step/increment  in each iteration. This method applies the parameter update.
in each iteration. This method applies the parameter update.
- Remarks
- Make sure to update only non-fixed parameters according to parameterDimension().
- It is highly recommended to override this method for particular problems in order to speed up parameter updates
- Parameters
-
[in] increment Parameter update [parameterDimension() x 1]
Reimplemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
Definition at line 56 of file optimization_problem_interface.cpp.
◆ applyIncrement() [2/2]
|
virtual |
Apply increment to the current parameter set (single element overload)
- Parameters
-
[in] idx Value index according vector size [parameterDimension() x 1] [in] increment Parameter update [parameterDimension() x 1]
Reimplemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
Definition at line 63 of file optimization_problem_interface.cpp.
◆ backupParameters()
|
pure virtual |
Restore parameter set from the last backup and keep backup if desired.
Implemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ checkIfAllUnfixedParam()
|
virtual |
Check if a function taking the parameter value and unfixed-idx is true for all unfixed parameter values.
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 1667 of file optimization_problem_interface.cpp.
◆ clear()
|
inlinevirtual |
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 78 of file optimization_problem_interface.h.
◆ computeBoundsForTwoSideBoundedLinearForm()
|
virtual |
Compute lower and upper bounds lbA and ubA for the linear form lbA <= A x <= ubA.
Especially some QP solvers require either
lbA <= A x<= ubA
or
lbA <= A x <= ubA lb <= x <= ub
The first formulatin includes bounds and hence the bottom rows of A are the identity. However, in case lb and ub are infinity, A might have obsolete rows.
If parameter include_bounds is true: only finite bounds are considered and vectors lbA and ubA are of size [getEqualityDimension() + getInequalityDimension() + finiteCombinedBounds() x 1].
If parameter include_bounds is false: the vectors are of size [getEqualityDimension() + getInequalityDimension() x 1].
- Parameters
-
[out] A Combined jacobian (see description above) [in] include_finite_bounds Specify whether bounds should be included in A (check dimension of A as descirbed above)
Definition at line 1141 of file optimization_problem_interface.cpp.
◆ computeCombinedSparseJacobian()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased, and corbo::HyperGraphOptimizationProblemVertexBased.
Definition at line 702 of file optimization_problem_interface.cpp.
◆ computeCombinedSparseJacobiansNNZ()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased, and corbo::HyperGraphOptimizationProblemVertexBased.
Definition at line 813 of file optimization_problem_interface.cpp.
◆ computeCombinedSparseJacobiansStructure()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased, and corbo::HyperGraphOptimizationProblemVertexBased.
Definition at line 824 of file optimization_problem_interface.cpp.
◆ computeCombinedSparseJacobiansValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased, and corbo::HyperGraphOptimizationProblemVertexBased.
Definition at line 872 of file optimization_problem_interface.cpp.
◆ computeDenseHessianEqualities()
|
virtual |
Definition at line 1324 of file optimization_problem_interface.cpp.
◆ computeDenseHessianInequalities()
|
virtual |
Definition at line 1401 of file optimization_problem_interface.cpp.
◆ computeDenseHessianObjective() [1/2]
|
virtual |
Compute the objective Hessian Hf(x) for the current parameter set.
- Remarks
- In case objectiveDimension() > 1: all individual hessians are summed up.
- Parameters
-
[in] jacobian Jacobian matrix which is used for the Hessian computation [objectiveDimension() x parameterDimension()] [out] hessian The resulting Hessian matrix [parameterDimension() x parameterDimension()]. Warning: The matrix must be pre-allocated, the resulting hessian is ADDED to the previous values in hessian, e.g. hessian += dense_hessian_objective. [in] multipliers Optionally provide a vector of multipliers to scale each cost function term [objectiveDimension() x 1] [in] jacob_scaled If multiplier is valid and selected, specify whether the jacobianis already scaled withmultiplier.
Definition at line 1185 of file optimization_problem_interface.cpp.
◆ computeDenseHessianObjective() [2/2]
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1191 of file optimization_problem_interface.cpp.
◆ computeDenseHessians()
|
virtual |
Definition at line 1498 of file optimization_problem_interface.cpp.
◆ computeDenseJacobianActiveInequalities()
|
virtual |
Compute the Jacobian Jc(x) with non-zeros for active constraints c(x)>= 0 and zeros for inactive ones.
- Parameters
-
[out] jacobian The resulting Jacobian matrix [inequalityDimension() x parameterDimension()]. Warning: the matrix must be pre-allocated with ZEROS! [in] weight Optionally provide a weight factor
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 439 of file optimization_problem_interface.cpp.
◆ computeDenseJacobianEqualities()
|
virtual |
Compute the equality constraint Jacobian Jceq(x) for the current parameter set.
- Parameters
-
[out] jacobian The resulting Jacobian matrix [equalityDimension() x parameterDimension()]. Warning: the matrix must be pre-allocated with ZEROS! [in] multipliers Optionally provide a vector of multipliers to scale each cost function term [equalityDimension() x 1]
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 293 of file optimization_problem_interface.cpp.
◆ computeDenseJacobianFiniteCombinedBounds()
|
virtual |
Compute the Jacobian for finite combined bounds.
refer to computeDistanceFiniteCombinedBounds()
- Parameters
-
[out] jacobian The resulting Jacobian matrix [finiteCombinedBoundsDimension() x parameterDimension()]. Warning: the matrix must be pre-allocated with ZEROS! [in] weight Optionally provide a weight factor
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 566 of file optimization_problem_interface.cpp.
◆ computeDenseJacobianFiniteCombinedBoundsIdentity()
|
virtual |
Compute the Jacobian for finite combined bounds.
refer to getParametersAndBoundsFinite() The resulting matrix is just the identity matrix with omitted rows for non-finite bounds.
- Parameters
-
[out] jacobian The resulting Jacobian matrix [finiteCombinedBoundsDimension() x parameterDimension()].
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 682 of file optimization_problem_interface.cpp.
◆ computeDenseJacobianInequalities()
|
virtual |
Compute the inequality constraint Jacobian Jc(x) for the current parameter set.
- Parameters
-
[out] jacobian The resulting Jacobian matrix [inequalityDimension() x parameterDimension()]. Warning: the matrix must be pre-allocated with ZEROS! [in] multipliers Optionally provide a vector of multipliers to scale each cost function term [inequalityDimension() x 1]
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 366 of file optimization_problem_interface.cpp.
◆ computeDenseJacobianLsqObjective()
|
virtual |
Compute the objective Jacobian Jf(x) for the current parameter set.
- Parameters
-
[out] jacobian The resulting Jacobian matrix [objectiveDimension() x parameterDimension()]. Warning: the matrix must be pre-allocated with ZEROS! [in] multipliers Optionally provide a vector of multipliers to scale each cost function term [objectiveDimension() x 1]
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 217 of file optimization_problem_interface.cpp.
◆ computeDenseJacobians()
|
virtual |
Compute the objective and constraint Jacobians at once.
Use this method to speed up Jacobian computation if possible. The default implementation just calls the individual Jacobian computations.
- Remarks
- This method does not compute Jacobians for bounds due to their simplicity, compute them manually.
- Parameters
-
[out] jacobian_obj The resulting objective Jacobian matrix [objectiveDimension() x parameterDimension()]. Warning: the matrix must be pre-allocated with ZEROS! [out] jacobian_eq The resulting equality constraint Jacobian matrix [equalityDimension() x parameterDimension()]. Warning: the matrix must be pre-allocated with ZEROS! [out] jacobian_ineq The resulting inequality constraint Jacobian matrix [inequalityDimension() x parameterDimension()]. Warning: the matrix must be pre-allocated with ZEROS! [in] multipliers Optionally provide a vector of multipliers to scale each cost function term [objectiveDimension() + equalityDimension() + inequalityDimension() x 1]
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 489 of file optimization_problem_interface.cpp.
◆ computeDistanceFiniteCombinedBounds()
|
virtual |
Compute the distance to finite bound values (combined lower and upper)
The distance is given as (lb-x) if (x<lb) and (x-ub) if (x>ub), otherwise 0.
- Warning
- This dimension of the resulting vector corresponds to finite bounds only, hence the bound bust be finite and the value is non-zero if x < lb || x > ub, this method should be used according with computeFiniteCombinedBoundsJacobian().
- Parameters
-
[out] values The resulting value vector [finiteCombinedBoundsDimension() x 1]. Warning: the size must be pre-allocated!
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 132 of file optimization_problem_interface.cpp.
◆ computeGradientNonLsqObjective()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 203 of file optimization_problem_interface.cpp.
◆ computeGradientObjective()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 189 of file optimization_problem_interface.cpp.
◆ computeGradientObjectiveAndCombinedSparseJacobiansValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased, and corbo::HyperGraphOptimizationProblemVertexBased.
Definition at line 932 of file optimization_problem_interface.cpp.
◆ computeLowerAndUpperBoundDiff()
|
virtual |
Compute the distance between parameters and bounds.
This method might be used for sqp bound computation in the form
lb-x < dx < ub-x
- Warning
- This dimension of the resulting vector corresponds to finite bounds only, hence the bound bust be finite and the value is non-zero if x < lb || x > ub.
- Parameters
-
[out] lb_minus_x The resulting value vector [finiteCombinedBoundsDimension() x 1]; Warning: the size must be pre-allocated! [out] ub_minus_x The resulting value vector [finiteCombinedBoundsDimension() x 1]; Warning: the size must be pre-allocated!
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 157 of file optimization_problem_interface.cpp.
◆ computeSparseHessianEqualities()
|
virtual |
Definition at line 1391 of file optimization_problem_interface.cpp.
◆ computeSparseHessianEqualitiesNNZ()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1343 of file optimization_problem_interface.cpp.
◆ computeSparseHessianEqualitiesStructure()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1351 of file optimization_problem_interface.cpp.
◆ computeSparseHessianEqualitiesValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1369 of file optimization_problem_interface.cpp.
◆ computeSparseHessianInequalities()
|
virtual |
Definition at line 1468 of file optimization_problem_interface.cpp.
◆ computeSparseHessianInequalitiesNNZ()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1420 of file optimization_problem_interface.cpp.
◆ computeSparseHessianInequalitiesStructure()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1428 of file optimization_problem_interface.cpp.
◆ computeSparseHessianInequalitiesValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1446 of file optimization_problem_interface.cpp.
◆ computeSparseHessianLagrangian()
|
virtual |
Compute the hessian of the lagrangian L(x) = f(x) + lambda1 * c(x) + lambda2 * ceq(x)
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1565 of file optimization_problem_interface.cpp.
◆ computeSparseHessianLagrangianNNZperCol()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1632 of file optimization_problem_interface.cpp.
◆ computeSparseHessianObjective()
|
virtual |
Definition at line 1262 of file optimization_problem_interface.cpp.
◆ computeSparseHessianObjectiveLL()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1276 of file optimization_problem_interface.cpp.
◆ computeSparseHessianObjectiveNNZ()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1209 of file optimization_problem_interface.cpp.
◆ computeSparseHessianObjectiveNNZperCol()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1306 of file optimization_problem_interface.cpp.
◆ computeSparseHessianObjectiveStructure()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1217 of file optimization_problem_interface.cpp.
◆ computeSparseHessianObjectiveValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1237 of file optimization_problem_interface.cpp.
◆ computeSparseHessians()
|
virtual |
Definition at line 1523 of file optimization_problem_interface.cpp.
◆ computeSparseHessiansNNZ()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1533 of file optimization_problem_interface.cpp.
◆ computeSparseHessiansStructure()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1542 of file optimization_problem_interface.cpp.
◆ computeSparseHessiansValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1554 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianActiveInequalities()
|
virtual |
Definition at line 478 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianActiveInequalitiesValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 457 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianEqualities()
|
virtual |
Definition at line 355 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianEqualitiesNNZ()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 311 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianEqualitiesStructure()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 318 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianEqualitiesValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 334 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianFiniteCombinedBounds()
|
virtual |
Definition at line 647 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianFiniteCombinedBoundsNNZ()
|
virtual |
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 594 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianFiniteCombinedBoundsStructure()
|
virtual |
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 600 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianFiniteCombinedBoundsValues()
|
virtual |
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 619 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianInequalities()
|
virtual |
Definition at line 428 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianInequalitiesNNZ()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 384 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianInequalitiesStructure()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 391 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianInequalitiesValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 407 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianLsqObjective()
|
virtual |
Definition at line 281 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianLsqObjectiveNNZ()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 235 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianLsqObjectiveStructure()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 242 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianLsqObjectiveValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemVertexBased, and corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 259 of file optimization_problem_interface.cpp.
◆ computeSparseJacobians()
|
virtual |
Definition at line 521 of file optimization_problem_interface.cpp.
◆ computeSparseJacobiansNNZ()
|
virtual |
Definition at line 535 of file optimization_problem_interface.cpp.
◆ computeSparseJacobiansStructure()
|
virtual |
Definition at line 542 of file optimization_problem_interface.cpp.
◆ computeSparseJacobiansValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 551 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianTwoSideBoundedLinearForm()
|
virtual |
Compute the jacobian A for the linear form lbA <= A x <= lbB.
Especially some QP solvers require either
lbA <= A x<= ubA
or
lbA <= A x <= ubA lb <= x <= ub
The first formulatin includes bounds and hence the bottom rows of A are the identity. However, in case lb and ub are infinity, A might have obsolete rows.
If parameter include_bounds is true: only finite bounds are considered and matrix A is of size [getEqualityDimension() + getInequalityDimension() + finiteCombinedBounds() x parameterDimension()].
If parameter include_bounds is false: the size of matrix A is [getEqualityDimension() + getInequalityDimension() x parameterDimension()].
- Remarks
- this version defines the sparse matrix with long long indices (since it is required by osqp for example)
- Parameters
-
[out] A Combined jacobian (see description above) [in] include_finite_bounds Specify whether bounds should be included in A (check dimension of A as descirbed above) [in] col_nnz Estimate for number of nnz per column to speed up insertion
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 943 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianTwoSideBoundedLinearFormAndHessianLagrangian()
|
virtual |
Compute the Jacobian and Hessian of the lagrangian.
This method combines computeSparseJacobianTwoSideBoundedLinearForm() and computeSparseHessianLagrangian() in order to speed up computation. Often, Hessian computations rely on first order derivatives and so we do not need to compute the Jacobian twice.
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1650 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianTwoSideBoundedLinearFormAndHessianObjective()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1659 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianTwoSideBoundedLinearFormNNZ()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1038 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianTwoSideBoundedLinearFormNNZPerColumn()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1022 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianTwoSideBoundedLinearFormStructure()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1050 of file optimization_problem_interface.cpp.
◆ computeSparseJacobianTwoSideBoundedLinearFormValues()
|
virtual |
Reimplemented in corbo::HyperGraphOptimizationProblemEdgeBased.
Definition at line 1099 of file optimization_problem_interface.cpp.
◆ computeValueNonLsqObjective()
|
pure virtual |
◆ computeValueObjective()
|
virtual |
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 31 of file optimization_problem_interface.cpp.
◆ computeValues()
|
inlinevirtual |
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 252 of file optimization_problem_interface.h.
◆ computeValuesActiveInequality()
|
virtual |
Compute the values of the active inequality constraints (elementwise max(0, c(x)))
Return a vector [inequalityDimension() x 1] in which elements are set to max(0, c(x))
Weight scales the values to "weight*max(0, c(x))".
- Parameters
-
[out] values The resulting value vector [inequalityDimension() x 1]. Warning: the size must be pre-allocated! [in] weight Optionally provide a weight factor
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 118 of file optimization_problem_interface.cpp.
◆ computeValuesEquality()
|
pure virtual |
Compute the equality constraint values ceq(x) for the current parameter set.
- Parameters
-
[out] values The resulting value vector [equalityDimension() x 1]. Warning: the size must be pre-allocated!
Implemented in corbo::SimpleOptimizationProblemWithCallbacks, corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ computeValuesInequality()
|
pure virtual |
Compute the inequality constraint values c(x) for the current parameter set.
- Parameters
-
[out] values The resulting value vector [inequalityDimension() x 1]. Warning: the size must be pre-allocated!
Implemented in corbo::SimpleOptimizationProblemWithCallbacks, corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ computeValuesLsqObjective()
|
pure virtual |
Compute the objective function values f(x) for the current parameter set.
- Parameters
-
[out] values The resulting value vector [objectiveDimension() x 1]. Warning: the size must be pre-allocated!
Implemented in corbo::SimpleOptimizationProblemWithCallbacks, corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ discardBackupParameters()
|
pure virtual |
Implemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ finiteBoundsDimension()
|
virtual |
Dimension of the set of finite bounds (individual bounds ub and lb)
This method retuns the total number of finite bounds, in particular: numFinite(lb) + numFinite(ub) with numFinite counting values within interval [-CORBO_INF_DBL, CORBO_INF_DBL]. If all bounds are finite, the (maximum) value is 2*parameterDimension().
- Returns
- number of finite lower bounds + number of finite upper bounds
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 106 of file optimization_problem_interface.cpp.
◆ finiteCombinedBoundsDimension()
|
virtual |
Dimension of the set of finite bounds (combined such that each ub and lb component define a single dimension)
This method returns the number of parameters that exhibit either finite lower or finite upper bounds. In particular, it counts how often (is_finite(lb[i]) || is_finite(ub[i])) evaluates to true. The maximum value is parameterDimension().
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 94 of file optimization_problem_interface.cpp.
◆ getBounds()
|
virtual |
Get lower and upper bound vector.
- Parameters
-
[out] lb Lower bounds [parameterDimension() x 1] (must be pre-allocated!) [out] ub Upper bounds [parameterDimension() x 1] (must be pre-allocated!)
Reimplemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
Definition at line 81 of file optimization_problem_interface.cpp.
◆ getEqualityDimension()
|
pure virtual |
Total dimension of equality constraints.
Implemented in corbo::SimpleOptimizationProblemWithCallbacks, corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ getInequalityDimension()
|
pure virtual |
Total dimension of general inequality constraints.
Implemented in corbo::SimpleOptimizationProblemWithCallbacks, corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ getLowerBound()
|
pure virtual |
Return specific lower bound value of a parameter.
- Parameters
-
[in] idx Value index according vector size [parameterDimension() x 1]
- Returns
- lower bound value
Implemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ getLsqObjectiveDimension()
|
pure virtual |
Total dimension of least-squares objective function terms.
Implemented in corbo::SimpleOptimizationProblemWithCallbacks, corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ getNonLsqObjectiveDimension()
|
pure virtual |
Get dimension of the objective (should be zero or one)
Implemented in corbo::SimpleOptimizationProblemWithCallbacks, corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ getObjectiveDimension()
|
pure virtual |
Get dimension of the objective (should be zero or one, includes Lsq objectives if present)
Implemented in corbo::SimpleOptimizationProblemWithCallbacks, corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ getParameterDimension()
|
pure virtual |
Effictive dimension of the optimization parameter set (changeable, non-fixed part)
Implemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ getParametersAndBoundsFinite()
|
virtual |
Return bound and parameter vectors only for finite boudns.
The values are returned if lb < inf or ub < inf. The Dimension of each vector is finiteCombinedBoundsDimension().
- Warning
- This dimension of the resulting vector corresponds to finite bounds only, this method should be used according with computeFiniteCombinedBoundsJacobian().
- Parameters
-
[out] lb_finite_bounds Lower bounds [finiteCombinedBoundsDimension() x 1], Warning: the size must be pre-allocated! [out] ub_finite_bounds Upper bounds [finiteCombinedBoundsDimension() x 1], Warning: the size must be pre-allocated! [out] x_finite_bounds related parameters [finiteCombinedBoundsDimension() x 1], Warning: the size must be pre-allocated!
Reimplemented in corbo::BaseHyperGraphOptimizationProblem.
Definition at line 166 of file optimization_problem_interface.cpp.
◆ getParameterValue()
|
pure virtual |
Return specific value of the parameter vector.
- Parameters
-
[in] idx Value index according vector size [parameterDimension() x 1]
- Returns
- value
Implemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ getParameterVector()
|
virtual |
Return deep copy of the complete parameter vector.
- Parameters
-
[out] x Current parameter vector of size [parameterDimension() x 1] (must be pre-allocated!)
Reimplemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
Definition at line 43 of file optimization_problem_interface.cpp.
◆ getUpperBound()
|
pure virtual |
Return specific upper bound of a parameter.
- Parameters
-
[in] idx Value index according vector size [parameterDimension() x 1]
- Returns
- upper bound value
Implemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ isLeastSquaresProblem()
|
pure virtual |
Check if the underlying problem is defined in the least squares form.
Least-squares problems are defined as  and the function values and Jacobian are computed for
and the function values and Jacobian are computed for  rather than for
rather than for  . Specialiezed least-squares solvers require the optimization problem to be defined in this particular form.
. Specialiezed least-squares solvers require the optimization problem to be defined in this particular form.
In summary, the solver computes the squared l2-norm of the objective function value (scalar) if set to true.
- Returns
- true if all objectives are in least-squares form, false otherwise.
Implemented in corbo::SimpleOptimizationProblemWithCallbacks, corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ restoreBackupParameters()
|
pure virtual |
Discard last backup (or all)
Implemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ setBounds()
|
virtual |
Set lower and upper bound vector.
- Parameters
-
[in] lb Lower bounds [parameterDimension() x 1] [in] ub Upper bounds [parameterDimension() x 1]
Reimplemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
Definition at line 69 of file optimization_problem_interface.cpp.
◆ setLowerBound()
|
pure virtual |
Set specific lower bound of a parameter.
- Parameters
-
[in] idx Value index according vector size [parameterDimension() x 1] [in] lb New lower bound to be set
Implemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ setParameterValue()
|
pure virtual |
Set specific value of the parameter vector.
- Parameters
-
[in] idx Value index according vector size [parameterDimension() x 1] [in] x New value to be set
Implemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
◆ setParameterVector()
|
virtual |
Set complete parameter vector.
- Remarks
- The default implementation requires parameterDimension() to be valid, hence no automatic resizing
- Parameters
-
[in] x New parameter vector of size [parameterDimension() x 1]Push the current parameter set to some backup stack
Reimplemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
Definition at line 50 of file optimization_problem_interface.cpp.
◆ setUpperBound()
|
pure virtual |
Set specific upper bound of a parameter.
- Parameters
-
[in] idx Value index according vector size [parameterDimension() x 1] [in] ub New upper bound to be set
Implemented in corbo::BaseHyperGraphOptimizationProblem, and corbo::SimpleOptimizationProblem.
Member Data Documentation
◆ _warn_if_not_specialized
|
protected |
Definition at line 628 of file optimization_problem_interface.h.
The documentation for this class was generated from the following files: