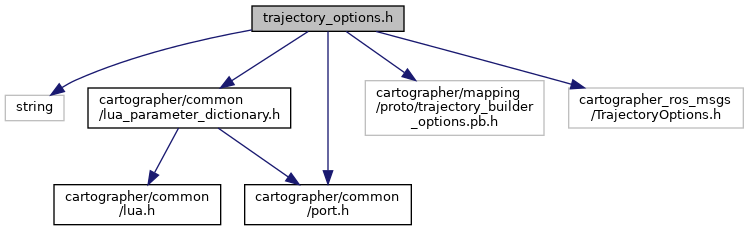
#include <string>#include "cartographer/common/lua_parameter_dictionary.h"#include "cartographer/common/port.h"#include "cartographer/mapping/proto/trajectory_builder_options.pb.h"#include "cartographer_ros_msgs/TrajectoryOptions.h"
Include dependency graph for trajectory_options.h:
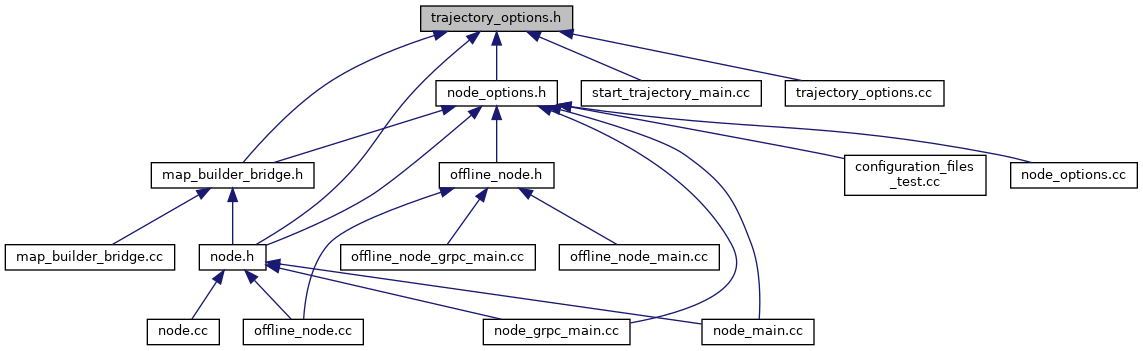
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | cartographer_ros::TrajectoryOptions |
Namespaces | |
| cartographer_ros | |
Functions | |
| ::cartographer::mapping::proto::InitialTrajectoryPose | cartographer_ros::CreateInitialTrajectoryPose (::cartographer::common::LuaParameterDictionary *lua_parameter_dictionary) |
| TrajectoryOptions | cartographer_ros::CreateTrajectoryOptions (::cartographer::common::LuaParameterDictionary *const lua_parameter_dictionary) |
| TrajectoryOptions | cartographer_ros::CreateTrajectoryOptions (::cartographer::common::LuaParameterDictionary *lua_parameter_dictionary, ::cartographer::common::LuaParameterDictionary *initial_trajectory_pose) |
| bool | cartographer_ros::FromRosMessage (const cartographer_ros_msgs::TrajectoryOptions &msg, TrajectoryOptions *options) |
| cartographer_ros_msgs::TrajectoryOptions | cartographer_ros::ToRosMessage (const TrajectoryOptions &options) |