Go to the source code of this file.
Classes | |
| struct | MatMatrixHeader |
| Struct containing the variable header for mat file. More... | |
| struct | TabularOutput |
| Stores internal information for tabular (debugging) output. More... | |
Macros | |
| #define | __ALWAYS_INITIALISE_WITH_ALL_EQUALITIES__ |
| #define | BEGIN_NAMESPACE_QPOASES |
| #define | END_NAMESPACE_QPOASES |
| #define | inline |
| #define | myStatic static |
| #define | QQ(I, J) _THIS->Q[(I)+NVMAX*(J)] |
| #define | REFER_NAMESPACE_QPOASES /*::*/ |
| #define | RR(I, J) _THIS->R[(I)+NVMAX*(J)] |
| #define | TT(I, J) _THIS->T[(I)*NVCMIN+(J)] |
| #define | USING_NAMESPACE_QPOASES |
Variables | |
| BEGIN_NAMESPACE_QPOASES typedef double | real_t |
Detailed Description
- Version
- 3.1embedded
- Date
- 2007-2015
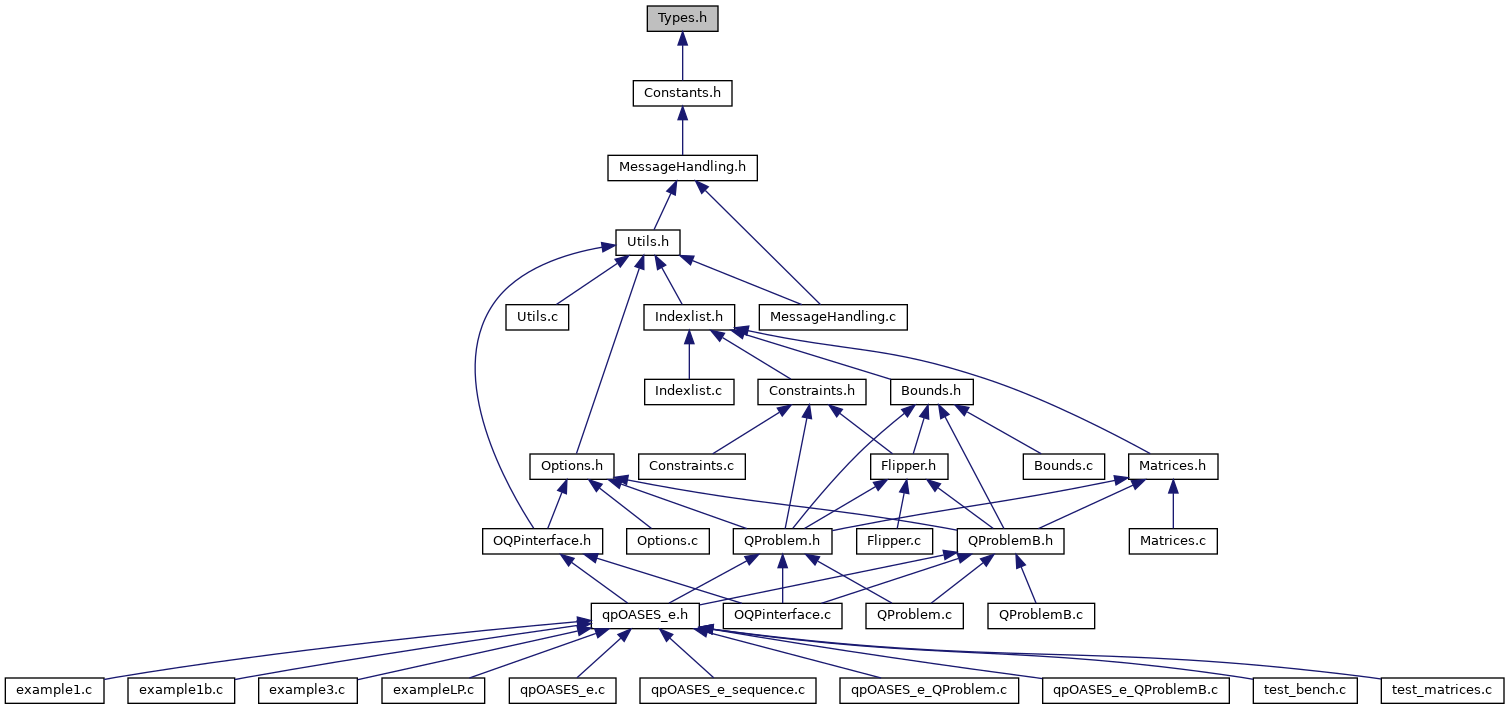
Declaration of all non-built-in types (except for classes).
Definition in file Types.h.
Macro Definition Documentation
◆ __ALWAYS_INITIALISE_WITH_ALL_EQUALITIES__
| #define __ALWAYS_INITIALISE_WITH_ALL_EQUALITIES__ |
◆ BEGIN_NAMESPACE_QPOASES
| #define BEGIN_NAMESPACE_QPOASES |
◆ END_NAMESPACE_QPOASES
| #define END_NAMESPACE_QPOASES |
◆ inline
◆ myStatic
| #define QQ | ( | I, | |
| J | |||
| ) | _THIS->Q[(I)+NVMAX*(J)] |
◆ REFER_NAMESPACE_QPOASES
| #define REFER_NAMESPACE_QPOASES /*::*/ |
◆ RR
◆ TT
◆ USING_NAMESPACE_QPOASES
| #define USING_NAMESPACE_QPOASES |
Enumeration Type Documentation
◆ BooleanType
| enum BooleanType |
Summarises all possible logical values.
◆ HessianType
| enum HessianType |
Summarises all possible types of the QP's Hessian matrix.
◆ PrintLevel
| enum PrintLevel |
Summarises all possible print levels. Print levels are used to describe the desired amount of output during runtime of qpOASES.
◆ QProblemStatus
| enum QProblemStatus |
Summarises all possible states of the (S)QProblem(B) object during the solution process of a QP sequence.
| Enumerator | |
|---|---|
| QPS_NOTINITIALISED | QProblem object is freshly instantiated or reset. |
| QPS_PREPARINGAUXILIARYQP | An auxiliary problem is currently setup, either at the very beginning via an initial homotopy or after changing the QP matrices. |
| QPS_AUXILIARYQPSOLVED | An auxilary problem was solved, either at the very beginning via an initial homotopy or after changing the QP matrices. |
| QPS_PERFORMINGHOMOTOPY | A homotopy according to the main idea of the online active set strategy is performed. |
| QPS_HOMOTOPYQPSOLVED | An intermediate QP along the homotopy path was solved. |
| QPS_SOLVED | The solution of the actual QP was found. |
| QPS_NOTINITIALISED | QProblem object is freshly instantiated or reset. |
| QPS_PREPARINGAUXILIARYQP | An auxiliary problem is currently setup, either at the very beginning via an initial homotopy or after changing the QP matrices. |
| QPS_AUXILIARYQPSOLVED | An auxilary problem was solved, either at the very beginning via an initial homotopy or after changing the QP matrices. |
| QPS_PERFORMINGHOMOTOPY | A homotopy according to the main idea of the online active set strategy is performed. |
| QPS_HOMOTOPYQPSOLVED | An intermediate QP along the homotopy path was solved. |
| QPS_SOLVED | The solution of the actual QP was found. |
| QPS_NOTINITIALISED | QProblem object is freshly instantiated or reset. |
| QPS_PREPARINGAUXILIARYQP | An auxiliary problem is currently setup, either at the very beginning via an initial homotopy or after changing the QP matrices. |
| QPS_AUXILIARYQPSOLVED | An auxilary problem was solved, either at the very beginning via an initial homotopy or after changing the QP matrices. |
| QPS_PERFORMINGHOMOTOPY | A homotopy according to the main idea of the online active set strategy is performed. |
| QPS_HOMOTOPYQPSOLVED | An intermediate QP along the homotopy path was solved. |
| QPS_SOLVED | The solution of the actual QP was found. |
| QPS_NOTINITIALISED | QProblem object is freshly instantiated or reset. |
| QPS_PREPARINGAUXILIARYQP | An auxiliary problem is currently setup, either at the very beginning via an initial homotopy or after changing the QP matrices. |
| QPS_AUXILIARYQPSOLVED | An auxilary problem was solved, either at the very beginning via an initial homotopy or after changing the QP matrices. |
| QPS_PERFORMINGHOMOTOPY | A homotopy according to the main idea of the online active set strategy is performed. |
| QPS_HOMOTOPYQPSOLVED | An intermediate QP along the homotopy path was solved. |
| QPS_SOLVED | The solution of the actual QP was found. |
| QPS_NOTINITIALISED | QProblem object is freshly instantiated or reset. |
| QPS_PREPARINGAUXILIARYQP | An auxiliary problem is currently setup, either at the very beginning via an initial homotopy or after changing the QP matrices. |
| QPS_AUXILIARYQPSOLVED | An auxilary problem was solved, either at the very beginning via an initial homotopy or after changing the QP matrices. |
| QPS_PERFORMINGHOMOTOPY | A homotopy according to the main idea of the online active set strategy is performed. |
| QPS_HOMOTOPYQPSOLVED | An intermediate QP along the homotopy path was solved. |
| QPS_SOLVED | The solution of the actual QP was found. |
◆ SubjectToStatus
| enum SubjectToStatus |
Summarises all possible states of bounds and constraints.
◆ SubjectToType
| enum SubjectToType |
Summarises all possible types of bounds and constraints.
◆ VisibilityStatus
| enum VisibilityStatus |
Defines visibility status of a message.
Variable Documentation
◆ real_t
| BEGIN_NAMESPACE_QPOASES typedef double real_t |