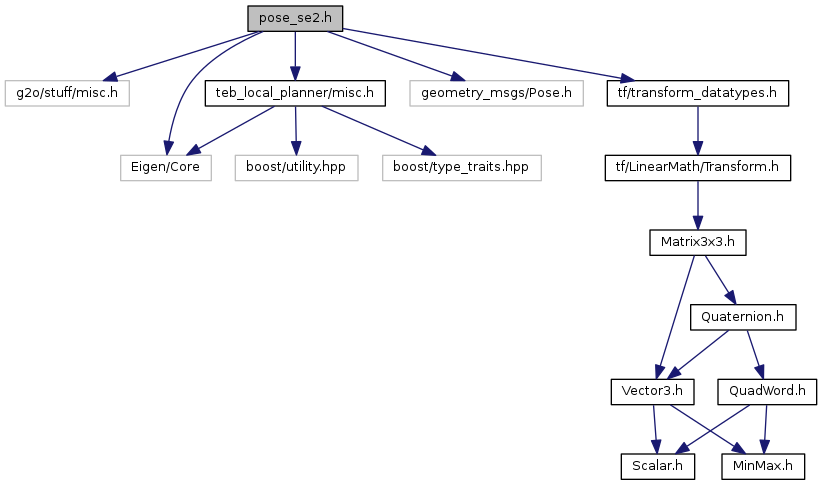
#include <g2o/stuff/misc.h>#include <Eigen/Core>#include <teb_local_planner/misc.h>#include <geometry_msgs/Pose.h>#include <tf/transform_datatypes.h>
Include dependency graph for pose_se2.h:
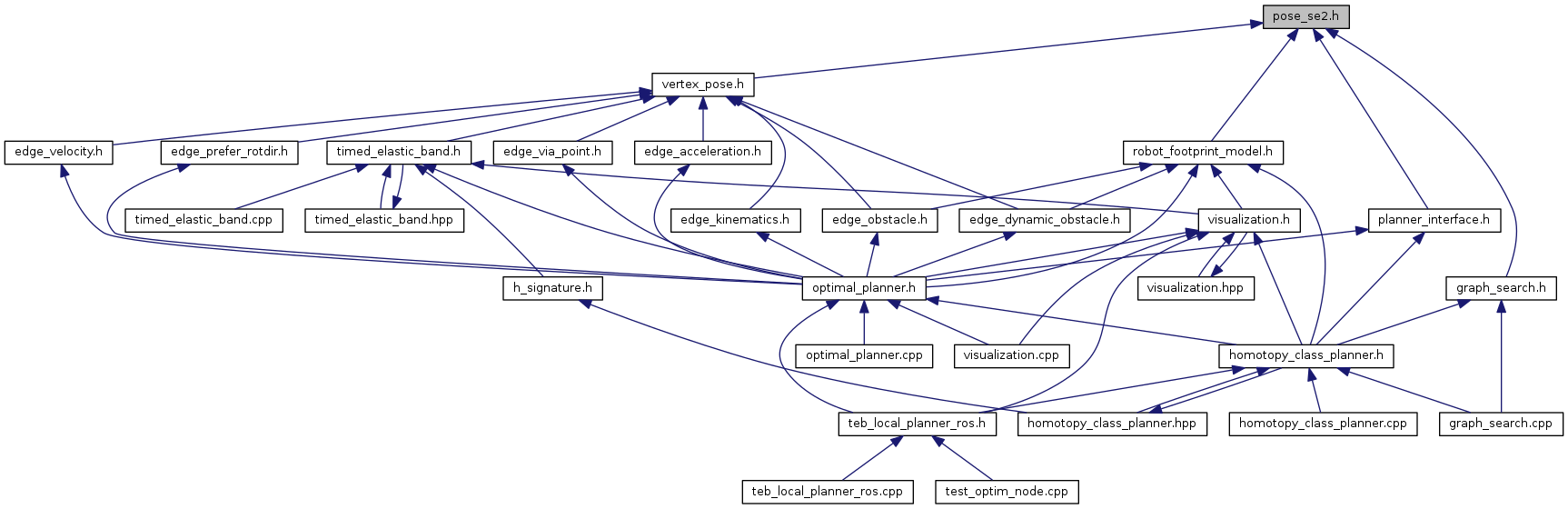
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | teb_local_planner::PoseSE2 |
This class implements a pose in the domain SE2:  The pose consist of the position x and y and an orientation given as angle theta [-pi, pi]. More... The pose consist of the position x and y and an orientation given as angle theta [-pi, pi]. More... | |
Namespaces | |
| teb_local_planner | |