#include "rtabmap/core/RtabmapExp.h"#include <opencv2/core/core.hpp>#include <map>#include <rtabmap/core/Transform.h>#include <pcl/pcl_base.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include "rtabmap/core/impl/util3d_mapping.hpp"
Include dependency graph for util3d_mapping.h:

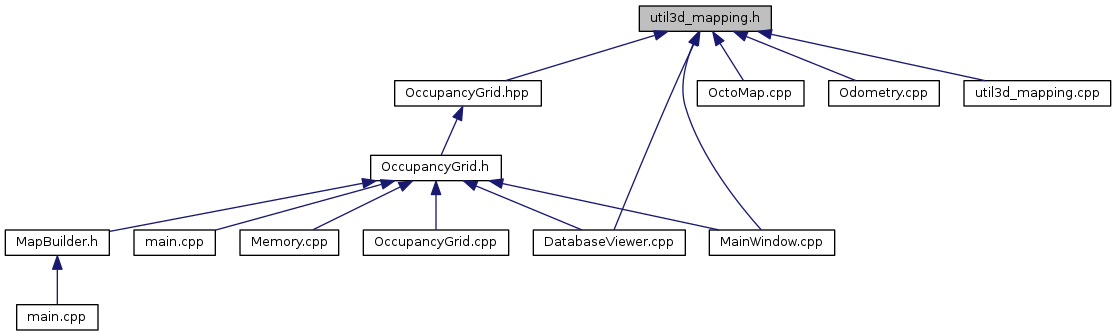
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rtabmap | |
| rtabmap::util3d | |
Functions | |
| cv::Mat RTABMAP_EXP | rtabmap::util3d::convertImage8U2Map (const cv::Mat &map8U, bool pgmFormat=false) |
| cv::Mat RTABMAP_EXP | rtabmap::util3d::convertMap2Image8U (const cv::Mat &map8S, bool pgmFormat=false) |
| cv::Mat RTABMAP_EXP | rtabmap::util3d::create2DMap (const std::map< int, Transform > &poses, const std::map< int, std::pair< cv::Mat, cv::Mat > > &scans, const std::map< int, cv::Point3f > &viewpoints, float cellSize, bool unknownSpaceFilled, float &xMin, float &yMin, float minMapSize=0.0f, float scanMaxRange=0.0f) |
| cv::Mat RTABMAP_EXP | rtabmap::util3d::create2DMapFromOccupancyLocalMaps (const std::map< int, Transform > &poses, const std::map< int, std::pair< cv::Mat, cv::Mat > > &occupancy, float cellSize, float &xMin, float &yMin, float minMapSize=0.0f, bool erode=false, float footprintRadius=0.0f) |
| cv::Mat RTABMAP_EXP | rtabmap::util3d::erodeMap (const cv::Mat &map) |
| template<typename PointT > | |
| void | rtabmap::util3d::occupancy2DFromCloud3D (const typename pcl::PointCloud< PointT >::Ptr &cloud, const pcl::IndicesPtr &indices, cv::Mat &ground, cv::Mat &obstacles, float cellSize, float groundNormalAngle, int minClusterSize, bool segmentFlatObstacles, float maxGroundHeight) |
| template<typename PointT > | |
| void | rtabmap::util3d::occupancy2DFromCloud3D (const typename pcl::PointCloud< PointT >::Ptr &cloud, cv::Mat &ground, cv::Mat &obstacles, float cellSize, float groundNormalAngle, int minClusterSize, bool segmentFlatObstacles, float maxGroundHeight) |
| template<typename PointT > | |
| void | rtabmap::util3d::occupancy2DFromGroundObstacles (const typename pcl::PointCloud< PointT >::Ptr &cloud, const pcl::IndicesPtr &groundIndices, const pcl::IndicesPtr &obstaclesIndices, cv::Mat &ground, cv::Mat &obstacles, float cellSize) |
| template<typename PointT > | |
| void | rtabmap::util3d::occupancy2DFromGroundObstacles (const typename pcl::PointCloud< PointT >::Ptr &groundCloud, const typename pcl::PointCloud< PointT >::Ptr &obstaclesCloud, cv::Mat &ground, cv::Mat &obstacles, float cellSize) |
| void RTABMAP_EXP | rtabmap::util3d::occupancy2DFromLaserScan (const cv::Mat &scanHit, const cv::Mat &scanNoHit, const cv::Point3f &viewpoint, cv::Mat &empty, cv::Mat &occupied, float cellSize, bool unknownSpaceFilled=false, float scanMaxRange=0.0f) |
| template<typename PointT > | |
| pcl::PointCloud< PointT >::Ptr | rtabmap::util3d::projectCloudOnXYPlane (const typename pcl::PointCloud< PointT > &cloud) |
| void RTABMAP_EXP | rtabmap::util3d::rayTrace (const cv::Point2i &start, const cv::Point2i &end, cv::Mat &grid, bool stopOnObstacle) |
| rtabmap::util3d::RTABMAP_DEPRECATED (void RTABMAP_EXP occupancy2DFromLaserScan(const cv::Mat &scan, cv::Mat &empty, cv::Mat &occupied, float cellSize, bool unknownSpaceFilled=false, float scanMaxRange=0.0f),"Use interface with \"viewpoint\" parameter to make sure the ray tracing origin is from the sensor and not the base.") | |
| rtabmap::util3d::RTABMAP_DEPRECATED (void RTABMAP_EXP occupancy2DFromLaserScan(const cv::Mat &scan, const cv::Point3f &viewpoint, cv::Mat &empty, cv::Mat &occupied, float cellSize, bool unknownSpaceFilled=false, float scanMaxRange=0.0f),"Use interface with scanHit/scanNoHit parameters: scanNoHit set to null matrix has the same functionality than this method.") | |
| rtabmap::util3d::RTABMAP_DEPRECATED (cv::Mat RTABMAP_EXP create2DMap(const std::map< int, Transform > &poses, const std::map< int, pcl::PointCloud< pcl::PointXYZ >::Ptr > &scans, float cellSize, bool unknownSpaceFilled, float &xMin, float &yMin, float minMapSize=0.0f, float scanMaxRange=0.0f),"Use interface with \"viewpoints\" parameter to make sure the ray tracing origin is from the sensor and not the base.") | |
| rtabmap::util3d::RTABMAP_DEPRECATED (cv::Mat RTABMAP_EXP create2DMap(const std::map< int, Transform > &poses, const std::map< int, pcl::PointCloud< pcl::PointXYZ >::Ptr > &scans, const std::map< int, cv::Point3f > &viewpoints, float cellSize, bool unknownSpaceFilled, float &xMin, float &yMin, float minMapSize=0.0f, float scanMaxRange=0.0f),"Use interface with cv::Mat scans.") | |
| template<typename PointT > | |
| void | rtabmap::util3d::segmentObstaclesFromGround (const typename pcl::PointCloud< PointT >::Ptr &cloud, const pcl::IndicesPtr &indices, pcl::IndicesPtr &ground, pcl::IndicesPtr &obstacles, int normalKSearch, float groundNormalAngle, float clusterRadius, int minClusterSize, bool segmentFlatObstacles=false, float maxGroundHeight=0.0f, pcl::IndicesPtr *flatObstacles=0, const Eigen::Vector4f &viewPoint=Eigen::Vector4f(0, 0, 100, 0)) |
| template<typename PointT > | |
| void | rtabmap::util3d::segmentObstaclesFromGround (const typename pcl::PointCloud< PointT >::Ptr &cloud, pcl::IndicesPtr &ground, pcl::IndicesPtr &obstacles, int normalKSearch, float groundNormalAngle, float clusterRadius, int minClusterSize, bool segmentFlatObstacles, float maxGroundHeight, pcl::IndicesPtr *flatObstacles, const Eigen::Vector4f &viewPoint) |