navsat_transform_node¶
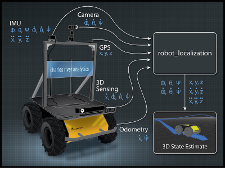
navsat_transform_node takes as input a nav_msgs/Odometry message (usually the output of ekf_localization_node or ukf_localization_node), a sensor_msgs/Imu containing an accurate estimate of your robot’s heading, and a sensor_msgs/NavSatFix message containing GPS data. It produces an odometry message in coordinates that are consistent with your robot’s world frame. This value can be directly fused into your state estimate.
Note
If you fuse the output of this node with any of the state estimation nodes in robot_localization, you should make sure that the odomN_differential setting is false for that input.
Parameters¶
~frequency¶
The real-valued frequency, in Hz, at which navsat_transform_node checks for new sensor_msgs/NavSatFix messages, and publishes filtered sensor_msgs/NavSatFix when publish_filtered_gps is set to true.
~delay¶
The time, in seconds, to wait before calculating the transform from GPS coordinates to your robot’s world frame.
~magnetic_declination_radians¶
Enter the magnetic declination for your location. If you don’t know it, see http://www.ngdc.noaa.gov/geomag-web (make sure to convert the value to radians). This parameter is needed if your IMU prodives its orientation with respect to the magnetic north.
~yaw_offset¶
Your IMU should read 0 for yaw when facing east. If it doesn’t, enter the offset here (desired_value = offset + sensor_raw_value). For example, if your IMU reports 0 when facing north, as most of them do, this parameter would be pi/2 (~1.5707963). This parameter changed in version 2.2.1. Previously, navsat_transform_node assumed that IMUs read 0 when facing north, so yaw_offset was used acordingly.
~zero_altitude¶
If this is true, the nav_msgs/Odometry message produced by this node has its pose Z value set to 0.
~publish_filtered_gps¶
If true, navsat_transform_node will also transform your robot’s world frame (e.g., map) position back to GPS coordinates, and publish a sensor_msgs/NavSatFix message on the /gps/filtered topic.
~broadcast_utm_transform¶
If this is true, navsat_transform_node will broadcast the transform between the UTM grid and the frame of the input odometry data. See Published Transforms below for more information.
~use_odometry_yaw¶
If true, navsat_transform_node will not get its heading from the IMU data, but from the input odometry message. Users should take care to only set this to true if your odometry message has orientation data specified in an earth-referenced frame, e.g., as produced by a magnetometer. Additionally, if the odometry source is one of the state estimation nodes in robot_localization, the user should have at least one source of absolute orientation data being fed into the node, with the _differential and _relative parameters set to false.
~wait_for_datum¶
If true, navsat_transform_node will wait to get a datum from either:
- The
datumparameter - The
set_datumservice
~broadcast_utm_transform_as_parent_frame¶
If true, navsat_transform_node will publish the utm->world_frame transform instead of the world_frame->utm transform.
Note that for the transform to be published broadcast_utm_transform also has to be set to true.
Subscribed Topics¶
imu/dataA sensor_msgs/Imu message with orientation dataodometry/filteredA nav_msgs/Odometry message of your robot’s current position. This is needed in the event that your first GPS reading comes after your robot has attained some non-zero pose.gps/fixA sensor_msgs/NavSatFix message containing your robot’s GPS coordinates
Published Topics¶
odometry/gpsA nav_msgs/Odometry message containing the GPS coordinates of your robot, transformed into its world coordinate frame. This message can be directly fused intorobot_localization‘s state estimation nodes.gps/filtered(optional) A sensor_msgs/NavSatFix message containing your robot’s world frame position, transformed into GPS coordinates
Published Transforms¶
world_frame->utm(optional) - If thebroadcast_utm_transformparameter is set to true,navsat_transform_nodecalculates a transform from the utm frame to theframe_idof the input odometry data. By default, the utm frame is published as a child of the odometry frame by using the inverse transform. With use of thebroadcast_utm_transform_as_parent_frameparameter, the utm frame will be published as a parent of the odometry frame. This is useful if you have multiple robots within one TF tree.