#include <regex>#include <mutex>#include <actionlib/client/simple_action_client.h>#include <control_msgs/FollowJointTrajectoryAction.h>#include <controller_manager/controller_manager.h>#include <combined_robot_hw/combined_robot_hw.h>#include <ros/callback_queue.h>#include <std_msgs/Int32.h>#include <qb_device_hardware_interface/qb_device_hardware_interface.h>
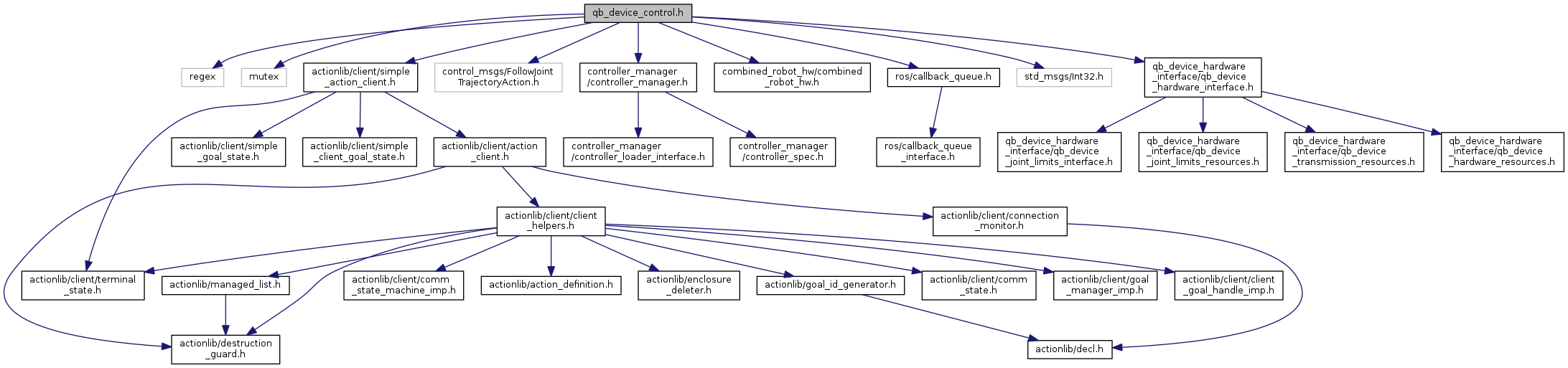
Include dependency graph for qb_device_control.h:
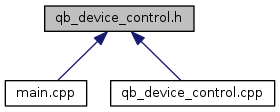
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | qb_device_control::qbDeviceControl |
| The qbrobotics Control interface provides all the common structures to control both the qbhand and qbmove devices. More... | |
Namespaces | |
| qb_device_control | |