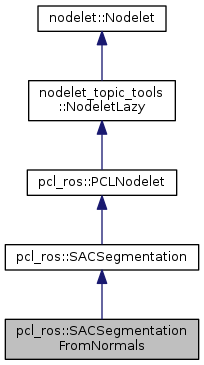
SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation. More...
#include <sac_segmentation.h>
Public Member Functions | |
| std::string | getInputTFframe () |
| Get the TF frame the input PointCloud should be transformed into before processing. More... | |
| std::string | getOutputTFframe () |
| Get the TF frame the PointCloud should be transformed into after processing. More... | |
| void | setInputTFframe (std::string tf_frame) |
| Set the input TF frame the data should be transformed into before processing, if input.header.frame_id is different. More... | |
| void | setOutputTFframe (std::string tf_frame) |
| Set the output TF frame the data should be transformed into after processing. More... | |
 Public Member Functions inherited from pcl_ros::SACSegmentation Public Member Functions inherited from pcl_ros::SACSegmentation | |
| std::string | getInputTFframe () |
| Get the TF frame the input PointCloud should be transformed into before processing. More... | |
| std::string | getOutputTFframe () |
| Get the TF frame the PointCloud should be transformed into after processing. More... | |
| SACSegmentation () | |
| Constructor. More... | |
| void | setInputTFframe (std::string tf_frame) |
| Set the input TF frame the data should be transformed into before processing, if input.header.frame_id is different. More... | |
| void | setOutputTFframe (std::string tf_frame) |
| Set the output TF frame the data should be transformed into after processing. More... | |
| Public Member Functions inherited from pcl_ros::PCLNodelet | |
| PCLNodelet () | |
| Empty constructor. More... | |
| Public Member Functions inherited from nodelet_topic_tools::NodeletLazy | |
| NodeletLazy () | |
| Public Member Functions inherited from nodelet::Nodelet | |
| void | init (const std::string &name, const M_string &remapping_args, const V_string &my_argv, ros::CallbackQueueInterface *st_queue=NULL, ros::CallbackQueueInterface *mt_queue=NULL) |
| Nodelet () | |
| virtual | ~Nodelet () |
Protected Member Functions | |
| void | axis_callback (const pcl_msgs::ModelCoefficientsConstPtr &model) |
| Model callback. More... | |
| void | config_callback (SACSegmentationFromNormalsConfig &config, uint32_t level) |
| Dynamic reconfigure callback. More... | |
| void | input_callback (const PointCloudConstPtr &cloud) |
| Input point cloud callback. Because we want to use the same synchronizer object, we push back empty elements with the same timestamp. More... | |
| void | input_normals_indices_callback (const PointCloudConstPtr &cloud, const PointCloudNConstPtr &cloud_normals, const PointIndicesConstPtr &indices) |
| Input point cloud callback. More... | |
| virtual void | onInit () |
| Nodelet initialization routine. More... | |
| virtual void | subscribe () |
| LazyNodelet connection routine. More... | |
| virtual void | unsubscribe () |
| Protected Member Functions inherited from pcl_ros::SACSegmentation | |
| void | config_callback (SACSegmentationConfig &config, uint32_t level) |
| Dynamic reconfigure callback. More... | |
| void | indices_callback (const PointIndicesConstPtr &indices) |
| Indices callback. Used when latched_indices_ is set. More... | |
| void | input_callback (const PointCloudConstPtr &input) |
| Input callback. Used when latched_indices_ is set. More... | |
| void | input_indices_callback (const PointCloudConstPtr &cloud, const PointIndicesConstPtr &indices) |
| Input point cloud callback. Used when use_indices is set. More... | |
| Protected Member Functions inherited from pcl_ros::PCLNodelet | |
| bool | isValid (const PointCloud2::ConstPtr &cloud, const std::string &topic_name="input") |
| Test whether a given PointCloud message is "valid" (i.e., has points, and width and height are non-zero). More... | |
| bool | isValid (const PointCloudConstPtr &cloud, const std::string &topic_name="input") |
| Test whether a given PointCloud message is "valid" (i.e., has points, and width and height are non-zero). More... | |
| bool | isValid (const PointIndicesConstPtr &indices, const std::string &topic_name="indices") |
| Test whether a given PointIndices message is "valid" (i.e., has values). More... | |
| bool | isValid (const ModelCoefficientsConstPtr &model, const std::string &topic_name="model") |
| Test whether a given ModelCoefficients message is "valid" (i.e., has values). More... | |
| Protected Member Functions inherited from nodelet_topic_tools::NodeletLazy | |
| ros::Publisher | advertise (ros::NodeHandle &nh, std::string topic, int queue_size, bool latch=false) |
| virtual void | connectionCallback (const ros::SingleSubscriberPublisher &pub) |
| virtual void | onInitPostProcess () |
| virtual void | warnNeverSubscribedCallback (const ros::WallTimerEvent &event) |
| Protected Member Functions inherited from nodelet::Nodelet | |
| ros::CallbackQueueInterface & | getMTCallbackQueue () const |
| ros::NodeHandle & | getMTNodeHandle () const |
| ros::NodeHandle & | getMTPrivateNodeHandle () const |
| const V_string & | getMyArgv () const |
| const std::string & | getName () const |
| ros::NodeHandle & | getNodeHandle () const |
| ros::NodeHandle & | getPrivateNodeHandle () const |
| const M_string & | getRemappingArgs () const |
| ros::CallbackQueueInterface & | getSTCallbackQueue () const |
| std::string | getSuffixedName (const std::string &suffix) const |
Protected Attributes | |
| message_filters::PassThrough< PointIndices > | nf_ |
| Null passthrough filter, used for pushing empty elements in the synchronizer. More... | |
| boost::shared_ptr< dynamic_reconfigure::Server< SACSegmentationFromNormalsConfig > > | srv_ |
| Pointer to a dynamic reconfigure service. More... | |
| ros::Subscriber | sub_axis_ |
| The input PointCloud subscriber. More... | |
| message_filters::Subscriber< PointCloudN > | sub_normals_filter_ |
| The normals PointCloud subscriber filter. More... | |
| std::string | tf_input_frame_ |
| The input TF frame the data should be transformed into, if input.header.frame_id is different. More... | |
| std::string | tf_input_orig_frame_ |
| The original data input TF frame. More... | |
| std::string | tf_output_frame_ |
| The output TF frame the data should be transformed into, if input.header.frame_id is different. More... | |
| Protected Attributes inherited from pcl_ros::SACSegmentation | |
| PointIndices | indices_ |
| Pointer to a set of indices stored internally. (used when latched_indices_ is set). More... | |
| int | min_inliers_ |
| message_filters::PassThrough< pcl_msgs::PointIndices > | nf_pi_ |
| Null passthrough filter, used for pushing empty elements in the synchronizer. More... | |
| ros::Publisher | pub_indices_ |
| The output PointIndices publisher. More... | |
| ros::Publisher | pub_model_ |
| The output ModelCoefficients publisher. More... | |
| boost::shared_ptr< dynamic_reconfigure::Server< SACSegmentationConfig > > | srv_ |
| Pointer to a dynamic reconfigure service. More... | |
| ros::Subscriber | sub_input_ |
| The input PointCloud subscriber. More... | |
| std::string | tf_input_frame_ |
| The input TF frame the data should be transformed into, if input.header.frame_id is different. More... | |
| std::string | tf_input_orig_frame_ |
| The original data input TF frame. More... | |
| std::string | tf_output_frame_ |
| The output TF frame the data should be transformed into, if input.header.frame_id is different. More... | |
| Protected Attributes inherited from pcl_ros::PCLNodelet | |
| bool | approximate_sync_ |
| True if we use an approximate time synchronizer versus an exact one (false by default). More... | |
| bool | latched_indices_ |
| Set to true if the indices topic is latched. More... | |
| int | max_queue_size_ |
| The maximum queue size (default: 3). More... | |
| ros::Publisher | pub_output_ |
| The output PointCloud publisher. More... | |
| message_filters::Subscriber< PointIndices > | sub_indices_filter_ |
| The message filter subscriber for PointIndices. More... | |
| message_filters::Subscriber< PointCloud > | sub_input_filter_ |
| The message filter subscriber for PointCloud2. More... | |
| tf::TransformListener | tf_listener_ |
| TF listener object. More... | |
| bool | use_indices_ |
| Set to true if point indices are used. More... | |
| Protected Attributes inherited from nodelet_topic_tools::NodeletLazy | |
| boost::mutex | connection_mutex_ |
| ConnectionStatus | connection_status_ |
| bool | ever_subscribed_ |
| bool | lazy_ |
| boost::shared_ptr< ros::NodeHandle > | nh_ |
| boost::shared_ptr< ros::NodeHandle > | pnh_ |
| std::vector< ros::Publisher > | publishers_ |
| ros::WallTimer | timer_ever_subscribed_ |
| bool | verbose_connection_ |
Private Types | |
| typedef pcl::PointCloud< pcl::PointXYZ > | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef pcl::PointCloud< pcl::Normal > | PointCloudN |
| typedef PointCloudN::ConstPtr | PointCloudNConstPtr |
| typedef PointCloudN::Ptr | PointCloudNPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Private Attributes | |
| pcl::SACSegmentationFromNormals< pcl::PointXYZ, pcl::Normal > | impl_ |
| The PCL implementation used. More... | |
| boost::mutex | mutex_ |
| Internal mutex. More... | |
| boost::shared_ptr< message_filters::Synchronizer< sync_policies::ApproximateTime< PointCloud, PointCloudN, PointIndices > > > | sync_input_normals_indices_a_ |
| Synchronized input, normals, and indices. More... | |
| boost::shared_ptr< message_filters::Synchronizer< sync_policies::ExactTime< PointCloud, PointCloudN, PointIndices > > > | sync_input_normals_indices_e_ |
Additional Inherited Members | |
| Public Types inherited from pcl_ros::PCLNodelet | |
| typedef boost::shared_ptr< const std::vector< int > > | IndicesConstPtr |
| typedef boost::shared_ptr< std::vector< int > > | IndicesPtr |
| typedef pcl_msgs::ModelCoefficients | ModelCoefficients |
| typedef ModelCoefficients::ConstPtr | ModelCoefficientsConstPtr |
| typedef ModelCoefficients::Ptr | ModelCoefficientsPtr |
| typedef pcl::PointCloud< pcl::PointXYZ > | PointCloud |
| typedef sensor_msgs::PointCloud2 | PointCloud2 |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
| typedef pcl_msgs::PointIndices | PointIndices |
| typedef PointIndices::ConstPtr | PointIndicesConstPtr |
| typedef PointIndices::Ptr | PointIndicesPtr |
Detailed Description
SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation.
Definition at line 181 of file sac_segmentation.h.
Member Typedef Documentation
|
private |
Definition at line 183 of file sac_segmentation.h.
|
private |
Definition at line 185 of file sac_segmentation.h.
|
private |
Definition at line 187 of file sac_segmentation.h.
|
private |
Definition at line 189 of file sac_segmentation.h.
|
private |
Definition at line 188 of file sac_segmentation.h.
|
private |
Definition at line 184 of file sac_segmentation.h.
Member Function Documentation
|
protected |
Model callback.
- Parameters
-
model the sample consensus model found
Definition at line 504 of file sac_segmentation.cpp.
|
protected |
Dynamic reconfigure callback.
- Parameters
-
config the config object level the dynamic reconfigure level
Definition at line 521 of file sac_segmentation.cpp.
|
inline |
Get the TF frame the input PointCloud should be transformed into before processing.
Definition at line 198 of file sac_segmentation.h.
|
inline |
Get the TF frame the PointCloud should be transformed into after processing.
Definition at line 206 of file sac_segmentation.h.
|
inlineprotected |
Input point cloud callback. Because we want to use the same synchronizer object, we push back empty elements with the same timestamp.
Definition at line 224 of file sac_segmentation.h.
|
protected |
Input point cloud callback.
- Parameters
-
cloud the pointer to the input point cloud cloud_normals the pointer to the input point cloud normals indices the pointer to the input point cloud indices
DEBUG
Definition at line 587 of file sac_segmentation.cpp.
|
protectedvirtual |
Nodelet initialization routine.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 364 of file sac_segmentation.cpp.
|
inline |
Set the input TF frame the data should be transformed into before processing, if input.header.frame_id is different.
- Parameters
-
tf_frame the TF frame the input PointCloud should be transformed into before processing
Definition at line 195 of file sac_segmentation.h.
|
inline |
Set the output TF frame the data should be transformed into after processing.
- Parameters
-
tf_frame the TF frame the PointCloud should be transformed into after processing
Definition at line 203 of file sac_segmentation.h.
|
protectedvirtual |
LazyNodelet connection routine.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 447 of file sac_segmentation.cpp.
|
protectedvirtual |
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 491 of file sac_segmentation.cpp.
Member Data Documentation
|
private |
The PCL implementation used.
Definition at line 274 of file sac_segmentation.h.
|
private |
Internal mutex.
Definition at line 271 of file sac_segmentation.h.
|
protected |
Null passthrough filter, used for pushing empty elements in the synchronizer.
Definition at line 233 of file sac_segmentation.h.
|
protected |
Pointer to a dynamic reconfigure service.
Definition at line 217 of file sac_segmentation.h.
|
protected |
The input PointCloud subscriber.
Definition at line 214 of file sac_segmentation.h.
|
protected |
The normals PointCloud subscriber filter.
Definition at line 211 of file sac_segmentation.h.
|
private |
Synchronized input, normals, and indices.
Definition at line 277 of file sac_segmentation.h.
|
private |
Definition at line 278 of file sac_segmentation.h.
|
protected |
The input TF frame the data should be transformed into, if input.header.frame_id is different.
Definition at line 236 of file sac_segmentation.h.
|
protected |
The original data input TF frame.
Definition at line 238 of file sac_segmentation.h.
|
protected |
The output TF frame the data should be transformed into, if input.header.frame_id is different.
Definition at line 240 of file sac_segmentation.h.
The documentation for this class was generated from the following files: