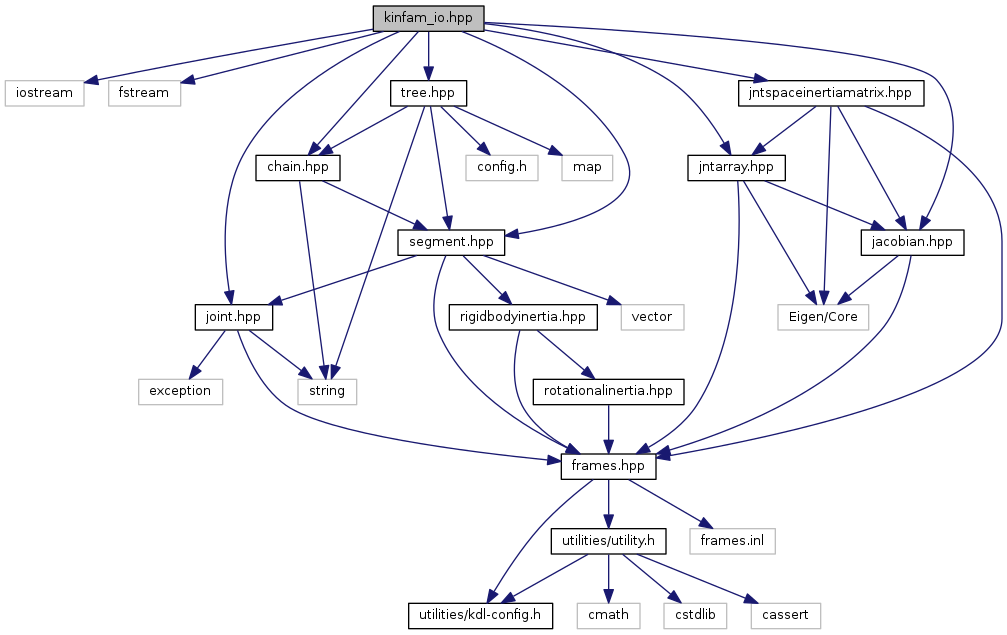
#include <iostream>#include <fstream>#include "joint.hpp"#include "segment.hpp"#include "chain.hpp"#include "jntarray.hpp"#include "jacobian.hpp"#include "tree.hpp"#include "jntspaceinertiamatrix.hpp"
Include dependency graph for kinfam_io.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| KDL | |
Functions | |
| std::ostream & | KDL::operator<< (std::ostream &os, const Joint &joint) |
| std::ostream & | KDL::operator<< (std::ostream &os, const Segment &segment) |
| std::ostream & | KDL::operator<< (std::ostream &os, const Chain &chain) |
| std::ostream & | KDL::operator<< (std::ostream &os, const Tree &tree) |
| std::ostream & | KDL::operator<< (std::ostream &os, SegmentMap::const_iterator root) |
| std::ostream & | KDL::operator<< (std::ostream &os, const JntArray &array) |
| std::ostream & | KDL::operator<< (std::ostream &os, const Jacobian &jac) |
| std::ostream & | KDL::operator<< (std::ostream &os, const JntSpaceInertiaMatrix &jntspaceinertiamatrix) |
| std::istream & | KDL::operator>> (std::istream &is, Joint &joint) |
| std::istream & | KDL::operator>> (std::istream &is, Segment &segment) |
| std::istream & | KDL::operator>> (std::istream &is, Chain &chain) |
| std::istream & | KDL::operator>> (std::istream &is, Tree &tree) |
| std::istream & | KDL::operator>> (std::istream &is, JntArray &array) |
| std::istream & | KDL::operator>> (std::istream &is, Jacobian &jac) |
| std::istream & | KDL::operator>> (std::istream &is, JntSpaceInertiaMatrix &jntspaceinertiamatrix) |