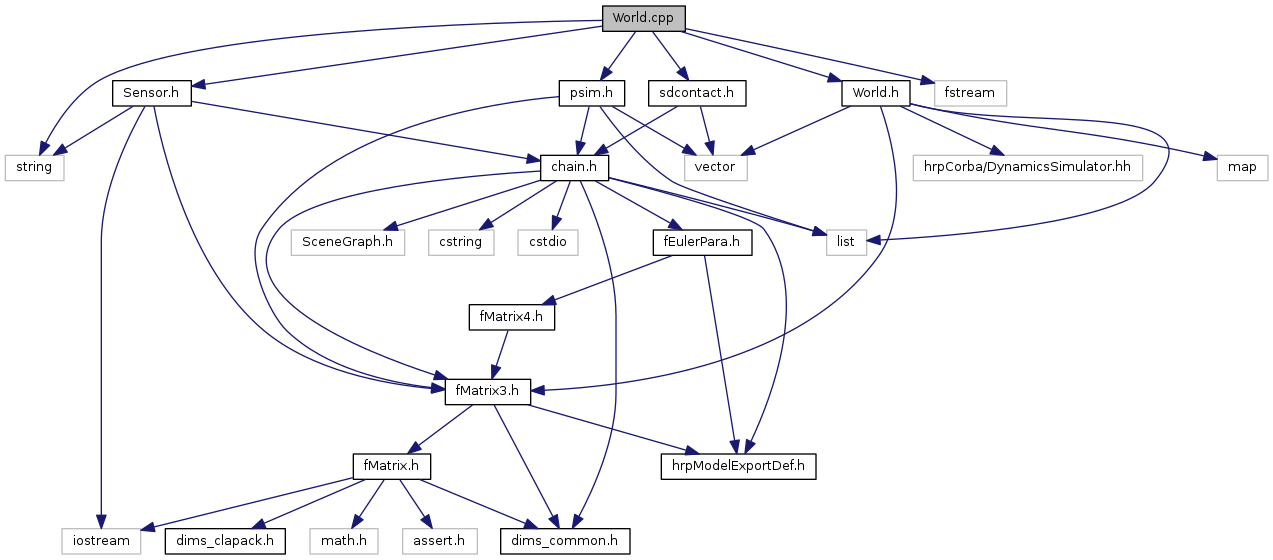
#include <string>#include "World.h"#include "psim.h"#include "Sensor.h"#include <fstream>#include <sdcontact.h>
Include dependency graph for server/UtDynamicsSimulator/World.cpp:
Go to the source code of this file.
Functions | |
| static void | mat33_to_array (const fMat33 &mat, OpenHRP::DblArray9 &a) |
| static void | vec3_to_array (const fVec3 &vec, double *a, int offset=0) |
Variables | |
| static const bool | debugMode = false |
| static const double | DEFAULT_GRAVITY_ACCELERATION = 9.80665 |
| static std::ofstream | logfile |
Function Documentation
Definition at line 466 of file server/UtDynamicsSimulator/World.cpp.
Definition at line 459 of file server/UtDynamicsSimulator/World.cpp.
Variable Documentation
|
static |
Definition at line 24 of file server/UtDynamicsSimulator/World.cpp.
|
static |
Definition at line 22 of file server/UtDynamicsSimulator/World.cpp.
|
static |
Definition at line 28 of file server/UtDynamicsSimulator/World.cpp.