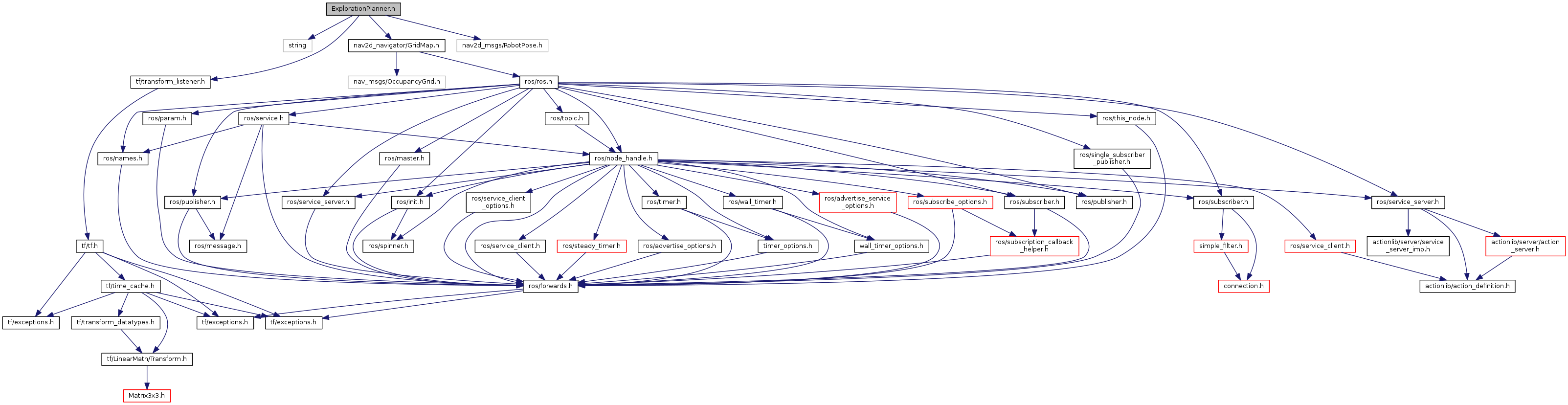
#include <string>#include <tf/transform_listener.h>#include <nav2d_msgs/RobotPose.h>#include <nav2d_navigator/GridMap.h>
Include dependency graph for ExplorationPlanner.h:
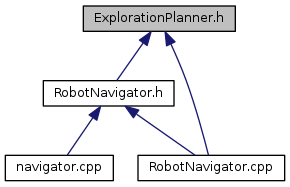
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ExplorationPlanner |
| class | RobotList |
Macros | |
| #define | EXPL_FAILED 4 |
| #define | EXPL_FINISHED 2 |
| #define | EXPL_TARGET_SET 1 |
| #define | EXPL_WAITING 3 |
Typedefs | |
| typedef std::map< unsigned int, geometry_msgs::Pose2D > | PoseList |
Macro Definition Documentation
| #define EXPL_FAILED 4 |
Definition at line 7 of file ExplorationPlanner.h.
| #define EXPL_FINISHED 2 |
Definition at line 5 of file ExplorationPlanner.h.
| #define EXPL_TARGET_SET 1 |
Definition at line 4 of file ExplorationPlanner.h.
| #define EXPL_WAITING 3 |
Definition at line 6 of file ExplorationPlanner.h.
Typedef Documentation
| typedef std::map<unsigned int, geometry_msgs::Pose2D> PoseList |
Definition at line 16 of file ExplorationPlanner.h.