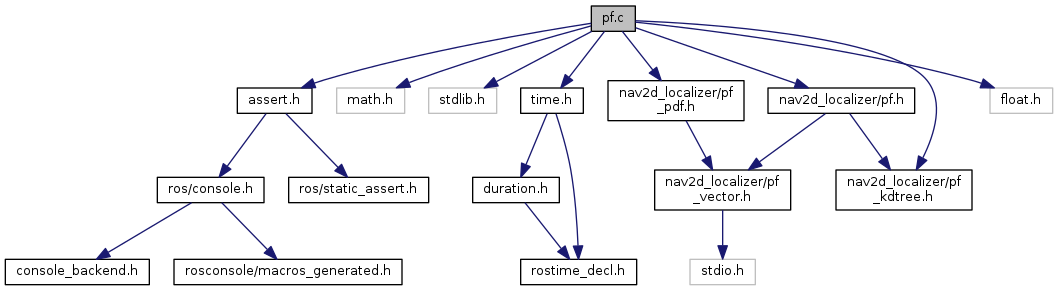
#include <assert.h>
#include <math.h>
#include <stdlib.h>
#include <time.h>
#include "nav2d_localizer/pf.h"
#include "nav2d_localizer/pf_pdf.h"
#include "nav2d_localizer/pf_kdtree.h"
#include <float.h>
Go to the source code of this file.
|
| pf_t * | pf_alloc (int min_samples, int max_samples, double alpha_slow, double alpha_fast, pf_init_model_fn_t random_pose_fn, void *random_pose_data) |
| |
| static void | pf_cluster_stats (pf_t *pf, pf_sample_set_t *set) |
| |
| void | pf_free (pf_t *pf) |
| |
| void | pf_get_cep_stats (pf_t *pf, pf_vector_t *mean, double *var) |
| |
| int | pf_get_cluster_stats (pf_t *pf, int clabel, double *weight, pf_vector_t *mean, pf_matrix_t *cov) |
| |
| void | pf_init (pf_t *pf, pf_vector_t mean, pf_matrix_t cov) |
| |
| void | pf_init_model (pf_t *pf, pf_init_model_fn_t init_fn, void *init_data) |
| |
| static int | pf_resample_limit (pf_t *pf, int k) |
| |
| void | pf_update_action (pf_t *pf, pf_action_model_fn_t action_fn, void *action_data) |
| |
| void | pf_update_resample (pf_t *pf) |
| |
| void | pf_update_sensor (pf_t *pf, pf_sensor_model_fn_t sensor_fn, void *sensor_data) |
| |
| pf_t* pf_alloc |
( |
int |
min_samples, |
|
|
int |
max_samples, |
|
|
double |
alpha_slow, |
|
|
double |
alpha_fast, |
|
|
pf_init_model_fn_t |
random_pose_fn, |
|
|
void * |
random_pose_data |
|
) |
| |
Definition at line 47 of file pf.c.
Definition at line 428 of file pf.c.
| void pf_free |
( |
pf_t * |
pf | ) |
|
Definition at line 113 of file pf.c.
Definition at line 560 of file pf.c.
Definition at line 596 of file pf.c.
Definition at line 130 of file pf.c.
Definition at line 169 of file pf.c.
| int pf_resample_limit |
( |
pf_t * |
pf, |
|
|
int |
k |
|
) |
| |
|
static |
Definition at line 403 of file pf.c.
Definition at line 203 of file pf.c.
| void pf_update_resample |
( |
pf_t * |
pf | ) |
|
Definition at line 269 of file pf.c.
Definition at line 217 of file pf.c.