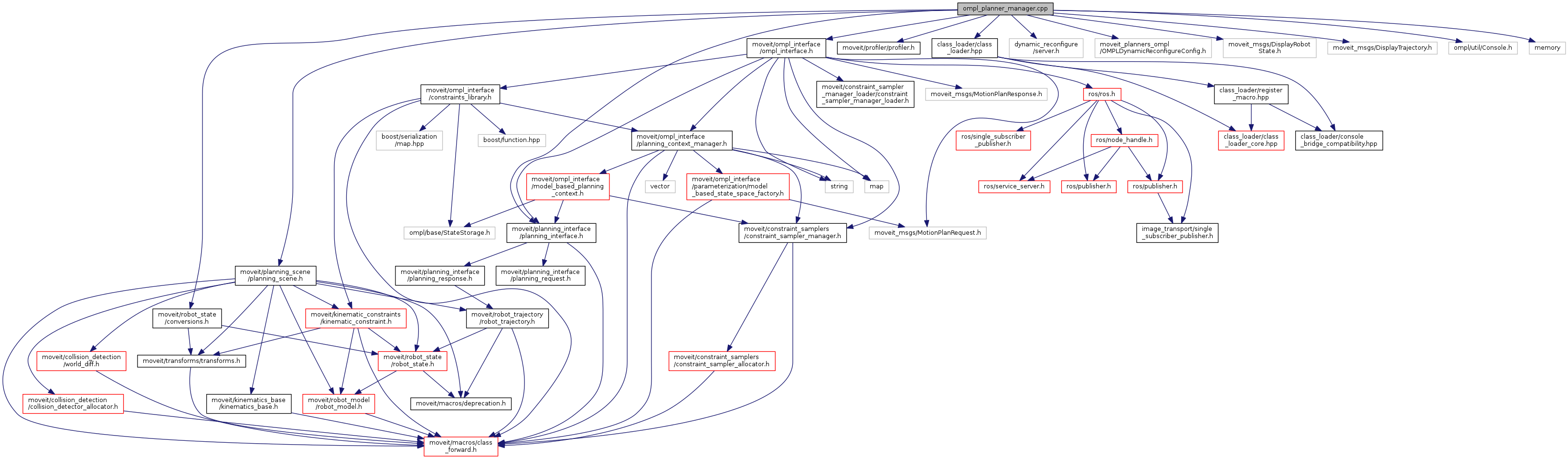
#include <moveit/ompl_interface/ompl_interface.h>#include <moveit/planning_interface/planning_interface.h>#include <moveit/planning_scene/planning_scene.h>#include <moveit/robot_state/conversions.h>#include <moveit/profiler/profiler.h>#include <class_loader/class_loader.hpp>#include <dynamic_reconfigure/server.h>#include "moveit_planners_ompl/OMPLDynamicReconfigureConfig.h"#include <moveit_msgs/DisplayRobotState.h>#include <moveit_msgs/DisplayTrajectory.h>#include <ompl/util/Console.h>#include <memory>
Include dependency graph for ompl_planner_manager.cpp:
Go to the source code of this file.
Classes | |
| class | ompl_interface::OMPLPlannerManager |
Namespaces | |
| ompl_interface | |
| The MoveIt! interface to OMPL. | |
Macros | |
| #define | OMPL_ROS_LOG(ros_log_level) |
Functions | |
| CLASS_LOADER_REGISTER_CLASS (ompl_interface::OMPLPlannerManager, planning_interface::PlannerManager) | |
Macro Definition Documentation
| #define OMPL_ROS_LOG | ( | ros_log_level | ) |
Value:
{ \
ROSCONSOLE_DEFINE_LOCATION(true, ros_log_level, ROSCONSOLE_NAME_PREFIX ".ompl"); \
if (ROS_UNLIKELY(__rosconsole_define_location__enabled)) \
::ros::console::print(0, __rosconsole_define_location__loc.logger_, __rosconsole_define_location__loc.level_, \
filename, line, __ROSCONSOLE_FUNCTION__, "%s", text.c_str()); \
}
#define ROS_UNLIKELY(x)
Definition at line 58 of file ompl_planner_manager.cpp.
Function Documentation
| CLASS_LOADER_REGISTER_CLASS | ( | ompl_interface::OMPLPlannerManager | , |
| planning_interface::PlannerManager | |||
| ) |