Example to generate a solver-independent formulation for the problem, taken from the IPOPT cpp_example. More...
Go to the source code of this file.
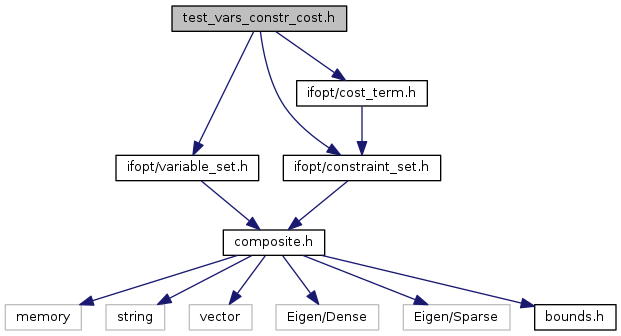
Classes | |
| class | ifopt::ExConstraint |
| class | ifopt::ExCost |
| class | ifopt::ExVariables |
Namespaces | |
| ifopt | |
| common namespace for all elements in this library. | |
Detailed Description
Example to generate a solver-independent formulation for the problem, taken from the IPOPT cpp_example.
The example problem to be solved is given as:
min_x f(x) = -(x1-2)^2
s.t.
0 = x0^2 + x1 - 1
-1 <= x0 <= 1
In this simple example we only use one set of variables, constraints and cost. However, most real world problems have multiple different constraints and also different variable sets representing different quantities. This framework allows to define each set of variables or constraints absolutely independently from another and correctly stitches them together to form the final optimization problem.
For a helpful graphical overview, see: http://docs.ros.org/api/ifopt/html/group__ProblemFormulation.html
Definition in file test_vars_constr_cost.h.