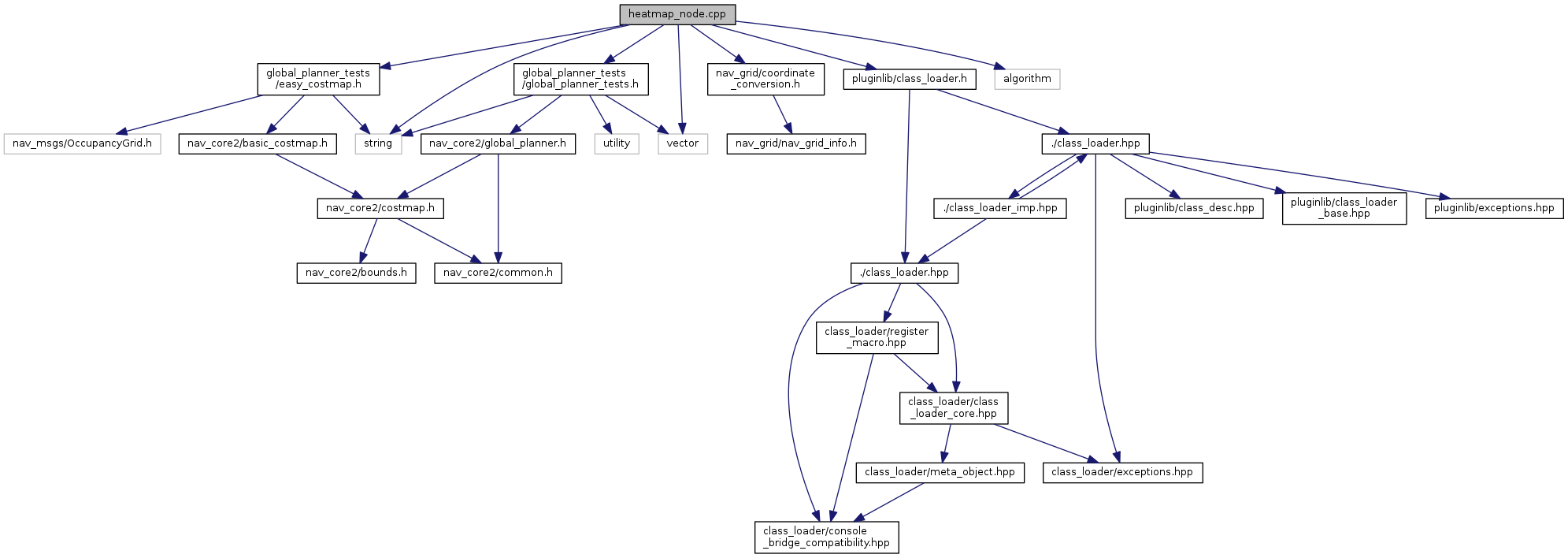
#include <global_planner_tests/global_planner_tests.h>#include <global_planner_tests/easy_costmap.h>#include <nav_grid/coordinate_conversion.h>#include <pluginlib/class_loader.h>#include <algorithm>#include <string>#include <vector>
Include dependency graph for heatmap_node.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Heatmap Test Runs a variation on checkValidPathCoverage() that prints a heatmap to the console with which cells in the map were frequently unable to get paths planned to/from them.
Useful for annoying corner cases where your planner fails. Definitely NOT speaking from experience.
See README.md for more details.
Definition at line 55 of file heatmap_node.cpp.