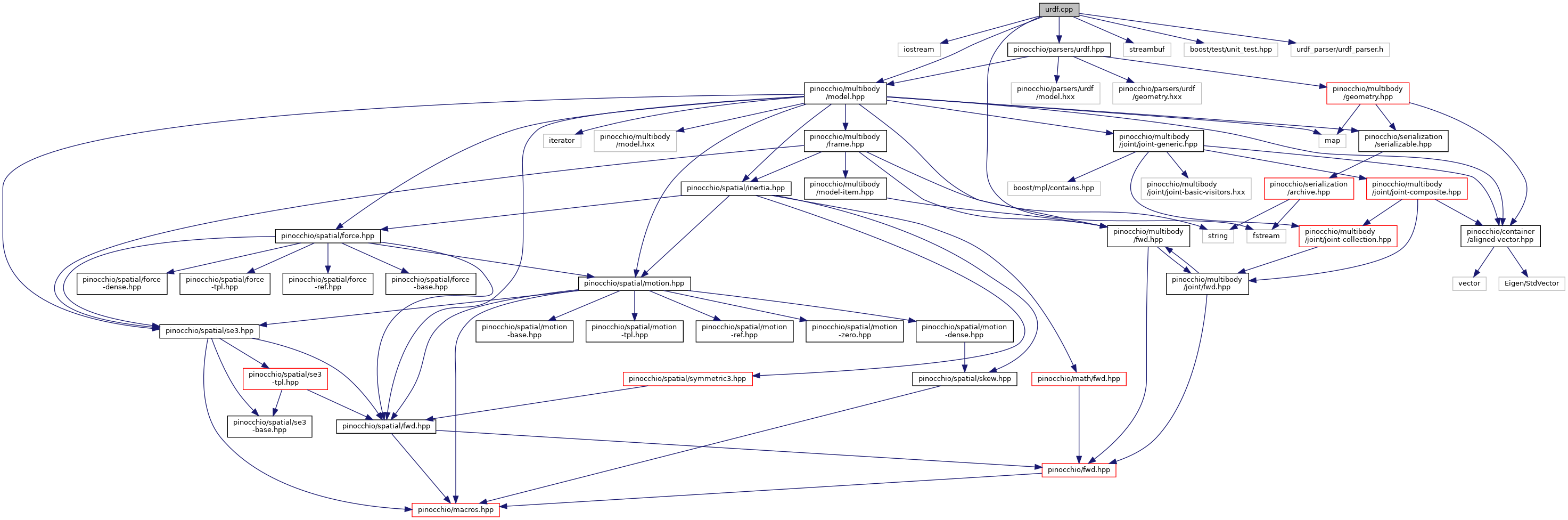
#include <iostream>
#include <fstream>
#include <streambuf>
#include "pinocchio/multibody/model.hpp"
#include "pinocchio/parsers/urdf.hpp"
#include <boost/test/unit_test.hpp>
#include <urdf_parser/urdf_parser.h>
Go to the source code of this file.
◆ BOOST_AUTO_TEST_CASE() [1/13]
| BOOST_AUTO_TEST_CASE |
( |
append_two_URDF_models |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [2/13]
| BOOST_AUTO_TEST_CASE |
( |
append_two_URDF_models_with_root_joint |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [3/13]
| BOOST_AUTO_TEST_CASE |
( |
build_model |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [4/13]
| BOOST_AUTO_TEST_CASE |
( |
build_model_from_UDRFTree |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [5/13]
| BOOST_AUTO_TEST_CASE |
( |
build_model_from_XML |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [6/13]
| BOOST_AUTO_TEST_CASE |
( |
build_model_simple_humanoid |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [7/13]
| BOOST_AUTO_TEST_CASE |
( |
build_model_with_joint |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [8/13]
| BOOST_AUTO_TEST_CASE |
( |
build_model_with_joint_from_UDRFTree |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [9/13]
| BOOST_AUTO_TEST_CASE |
( |
build_model_with_joint_from_XML |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [10/13]
| BOOST_AUTO_TEST_CASE |
( |
check_mesh_relative_path |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [11/13]
| BOOST_AUTO_TEST_CASE |
( |
check_specific_models |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [12/13]
| BOOST_AUTO_TEST_CASE |
( |
check_tree_from_XML |
| ) |
|
◆ BOOST_AUTO_TEST_CASE() [13/13]
| BOOST_AUTO_TEST_CASE |
( |
test_getFrameId_identical_link_and_joint_name |
| ) |
|