#include "pinocchio/extra/reachable-workspace.hpp"#include "pinocchio/algorithm/joint-configuration.hpp"#include "pinocchio/multibody/sample-models.hpp"#include "pinocchio/multibody/geometry.hpp"#include "pinocchio/parsers/urdf.hpp"#include <iostream>#include <boost/test/unit_test.hpp>#include <boost/utility/binary.hpp>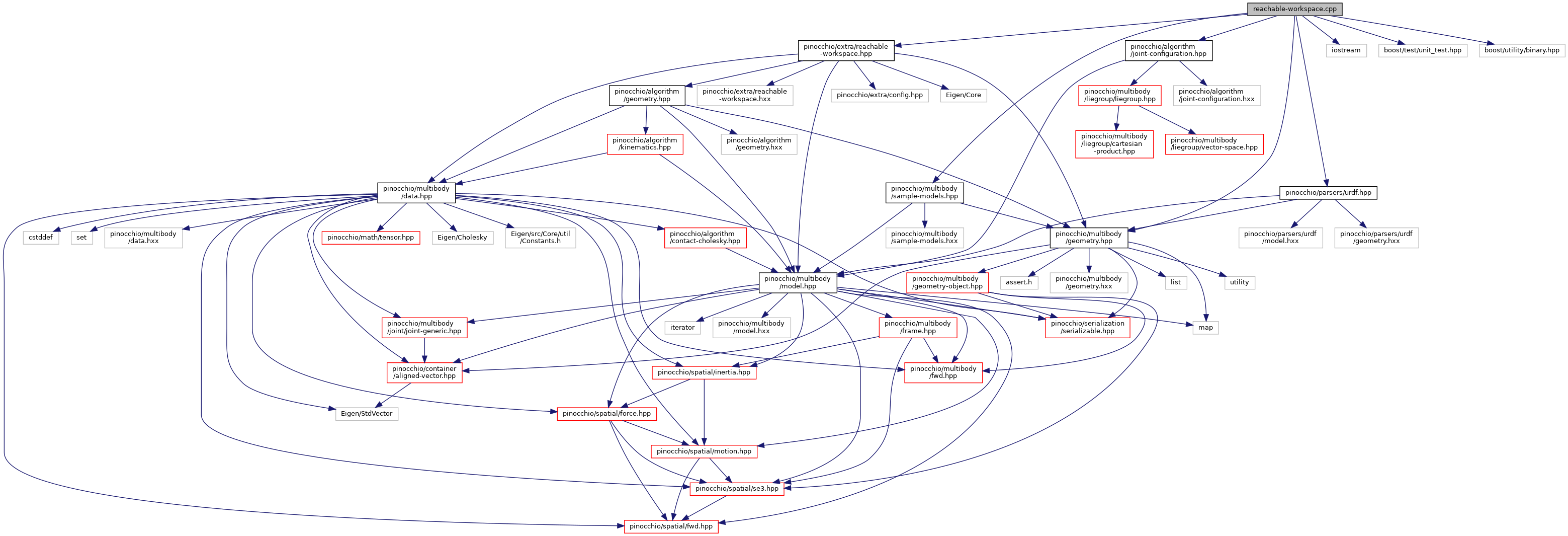
Go to the source code of this file.
Classes | |
| struct | robotCreationFixture |
| Create a fixture structure for boost test case. It will create a 3DOF robot with prismatic joints and initialize all variables needed for tests of the reachable workspace. More... | |
Functions | |
| BOOST_AUTO_TEST_CASE (test_combination_generation) | |
test generation combination function and compare to the output of the python function itertools.combinations More... | |
| BOOST_AUTO_TEST_CASE (test_compute_product) | |
test of the cartesian product function and compare it to the python function itertools.product More... | |
| BOOST_AUTO_TEST_CASE (test_compute_vel_config) | |
| test of the function computeJointVel, which mix 2 vectors according to a set of indexes More... | |
| BOOST_AUTO_TEST_CASE (test_reachable_workspace) | |
| test of the full pipeline for reachable workspace computation More... | |
| BOOST_AUTO_TEST_CASE (test_spherical) | |
| test reachable algorithm in cas nq!= nv More... | |
| BOOST_FIXTURE_TEST_CASE (test_compute_vertex, robotCreationFixture) | |
| test of the vertex computation for a 2DOf planar robot. Verify that vertex are inside the rectangle of the joint limits. More... | |
| static pinocchio::Model | createSpherical (double length) |
| Create a spherical joint with a stick of length l attached to it. More... | |
Function Documentation
◆ BOOST_AUTO_TEST_CASE() [1/5]
| BOOST_AUTO_TEST_CASE | ( | test_combination_generation | ) |
test generation combination function and compare to the output of the python function itertools.combinations
Definition at line 115 of file unittest/reachable-workspace.cpp.
◆ BOOST_AUTO_TEST_CASE() [2/5]
| BOOST_AUTO_TEST_CASE | ( | test_compute_product | ) |
test of the cartesian product function and compare it to the python function itertools.product
Definition at line 141 of file unittest/reachable-workspace.cpp.
◆ BOOST_AUTO_TEST_CASE() [3/5]
| BOOST_AUTO_TEST_CASE | ( | test_compute_vel_config | ) |
test of the function computeJointVel, which mix 2 vectors according to a set of indexes
Definition at line 203 of file unittest/reachable-workspace.cpp.
◆ BOOST_AUTO_TEST_CASE() [4/5]
| BOOST_AUTO_TEST_CASE | ( | test_reachable_workspace | ) |
test of the full pipeline for reachable workspace computation
Definition at line 292 of file unittest/reachable-workspace.cpp.
◆ BOOST_AUTO_TEST_CASE() [5/5]
| BOOST_AUTO_TEST_CASE | ( | test_spherical | ) |
test reachable algorithm in cas nq!= nv
Definition at line 318 of file unittest/reachable-workspace.cpp.
◆ BOOST_FIXTURE_TEST_CASE()
| BOOST_FIXTURE_TEST_CASE | ( | test_compute_vertex | , |
| robotCreationFixture | |||
| ) |
test of the vertex computation for a 2DOf planar robot. Verify that vertex are inside the rectangle of the joint limits.
Definition at line 226 of file unittest/reachable-workspace.cpp.
◆ createSpherical()
|
static |
Create a spherical joint with a stick of length l attached to it.
- Parameters
-
length length of the stick
- Returns
- pinochio model
Definition at line 23 of file unittest/reachable-workspace.cpp.